El vibrobot —un motor vibrador y una batería atados sobre la cabeza de un cepillo— en rigor no es un robot, porque su movimiento no se puede controlar, pero ha despertado el interés de muchos futuros roboticistas. Con un método de control ingenioso, sin embargo, sí se puede guiarlo en cualquier dirección usando un único motor.
Namaskar Mitro basó el diseño de este robot en un paper de investigación. Si el motor vibrador se monta en ángulo sobre la base del robot, la máquina rota; y si el motor se monta descentrado respecto al centro de masa, el robot se mueve en círculo. La clave: invertir el sentido de giro del motor invierte la dirección de rotación del robot. Cambiando rápidamente la dirección del giro, el bot puede moverse en una serie de arcos cortos y poco profundos que aproximan una línea recta.
¿Qué electrónica usa?
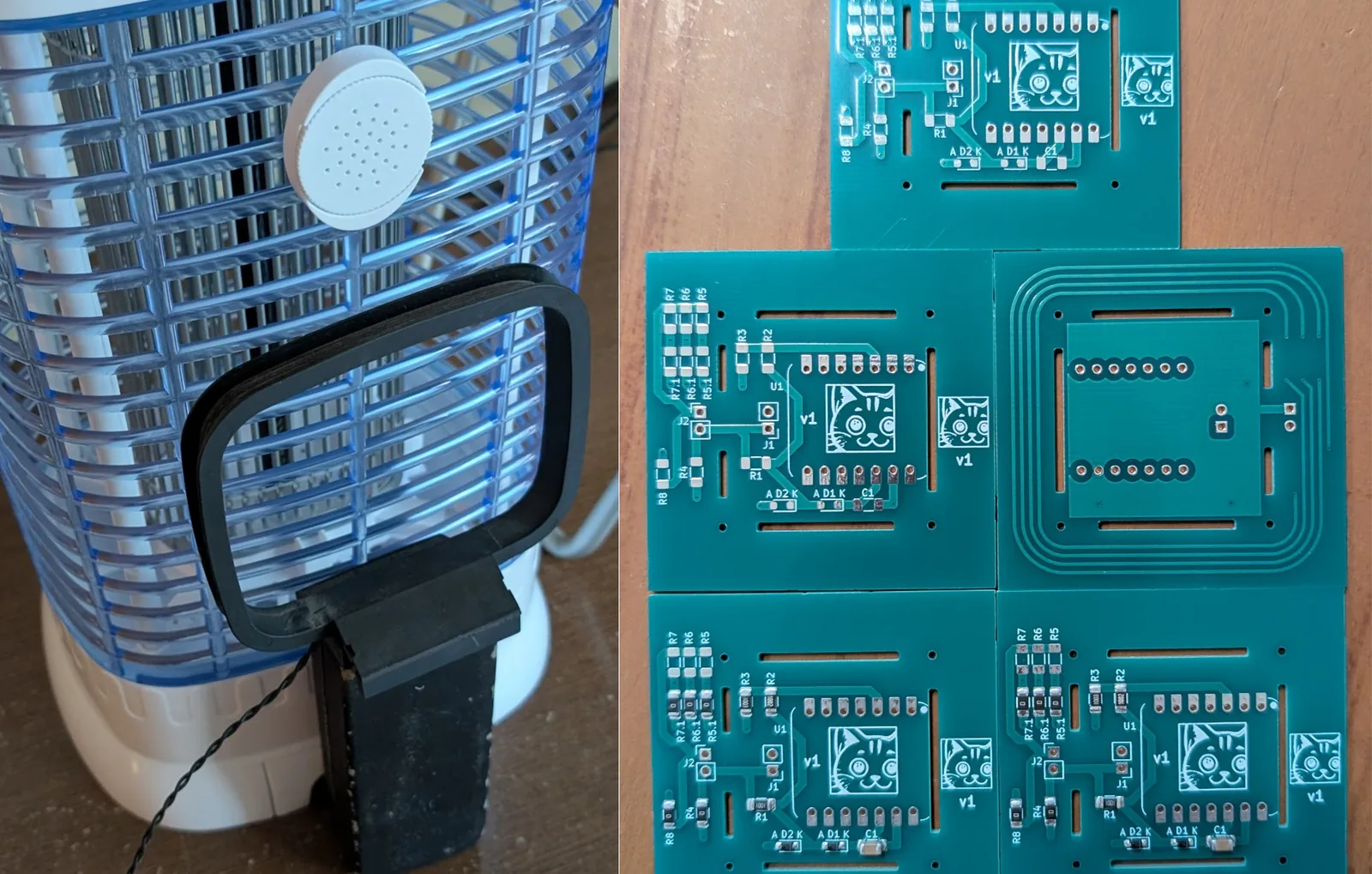
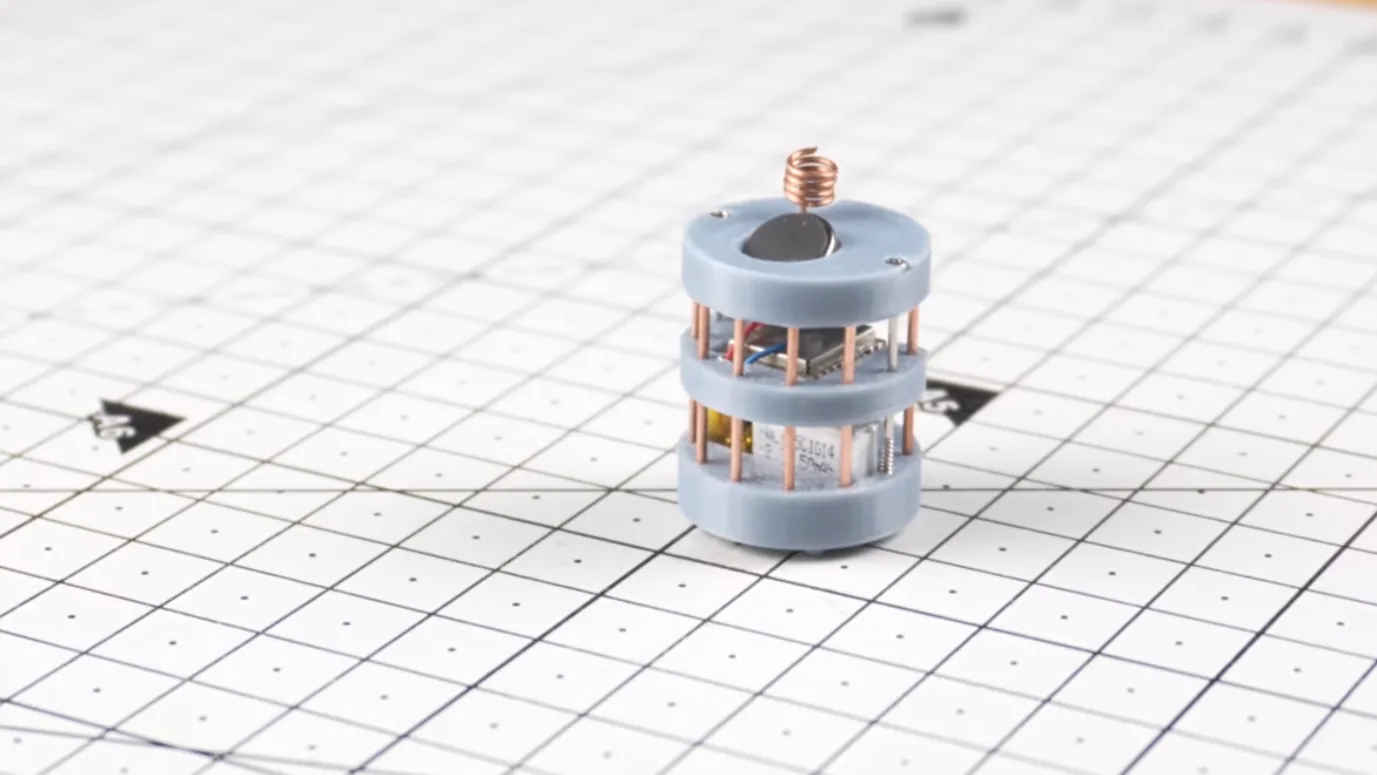
El robot que construyó Mitro está basado en un microcontrolador ESP-01F, lo que le permite ser controlado remotamente sobre Wi-Fi. Usa un driver de motor DRF8212 para manejar un motor vibrador de pager, todo alojado dentro de un encerramiento impreso en 3D. Para moverse en línea recta, el ESP-01F invierte el sentido de giro del motor cada 250 milisegundos, lo que aún produce un movimiento ligeramente errático. Aun así, puede seguir aproximadamente una trayectoria trazada.
¿Qué métodos previos había para controlar un vibrobot?
Esto se suma a los métodos de control que ya conocíamos: un par de motores vibradores accionados diferencialmente o un mecanismo de transferencia de peso.
¿Por qué importa para makers en LatAm?
El ESP-01F se consigue en tiendas chilenas como Olimex Chile o por AliExpress desde menos de USD 2, y el driver DRF8212 cuesta menos de USD 3. Sumado al motor de pager (CLP 500 en cualquier tienda de hobby) y a la batería de litio reciclada de un VAPE descartado, el costo total del proyecto cabe bajo los CLP 6.000. Es uno de los pocos proyectos de control robótico con costo de entrada realmente cero, ideal para clubes de electrónica escolares o cursos de mecatrónica básica.
Gracias a [110y6] por el dato.
Publicado originalmente en Hackaday.