Los robots alcanzaron niveles impresionantes de confiabilidad en ambientes estructurados, como fábricas y bodegas, donde el layout es predecible y las tareas siguen flujos preestablecidos. El mundo real, sin embargo, rara vez ofrece esa estabilidad. Hogares, zonas de desastre, sitios de construcción y operaciones logísticas al aire libre son entornos desestructurados, dinámicos y en constante cambio, lo que plantea un desafío serio a la navegación.
Los stacks tradicionales dependen fuertemente de entornos pre-mapeados, pipelines de control deterministas y lógica de decisión basada en reglas. Técnicas como SLAM (Simultaneous Localization and Mapping) permiten a los robots construir mapas y estimar su posición, pero la mayoría de los sistemas asume entornos relativamente estables. Esas asunciones fallan cuando aparecen obstáculos en movimiento, mapas incompletos o terreno desconocido, lo que limita muchos despliegues a settings estrechamente controlados.
La IA agéntica introduce un enfoque distinto. Al permitir que los robots perciban contexto, razonen sobre objetivos y elijan acciones dinámicamente, los frameworks agénticos habilitan navegación más adaptativa. Veamos cómo estas arquitecturas habilitan navegación robótica de propósito general y cómo se integran con los stacks de robótica existentes.
De robots reactivos a navegación agéntica

La navegación robótica evolucionó significativamente en las últimas décadas. Los primeros sistemas usaban arquitecturas de control reactivo diseñadas para responder a entradas de sensores en tiempo real. Eran efectivas para tareas específicas, pero carecían de la capacidad de razonar sobre metas o adaptarse a situaciones nuevas.
A medida que los despliegues robóticos se expanden fuera de entornos controlados, se vuelven necesarias capacidades de decisión más flexibles.
Arquitectura tradicional de robótica
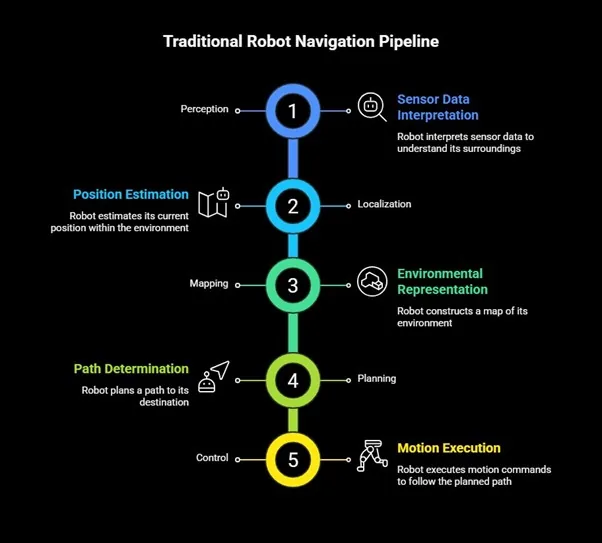
La mayoría de los robots modernos sigue todavía un pipeline estructurado de navegación: Percepción → Localización → Mapeo → Planificación → Control. La percepción interpreta los datos del sensor, la localización estima la posición del robot, el mapeo construye una representación del entorno, la planificación determina la ruta y el control ejecuta los comandos de movimiento. El sistema es modular y confiable, pero también rígido.
Enfoques previos como las arquitecturas subsumption enfatizaban comportamientos reactivos y priorizaban respuestas guiadas por sensores antes que razonamiento de alto nivel.
Limitaciones de los stacks tradicionales
Aunque efectivos en entornos estables, los pipelines tradicionales tienen dificultades con condiciones desconocidas o que cambian rápido. Estos sistemas suelen asumir conocimiento previo del entorno y variabilidad limitada en obstáculos o tareas. Como resultado, los robots se pueden comportar de forma impredecible cuando se topan con mapas incompletos, objetos nuevos o cambios inesperados.
Qué cambia con la IA agéntica
La IA agéntica introduce planificación dirigida por objetivos, ciclos iterativos de razonamiento, memoria contextual y uso dinámico de herramientas a lo largo del stack robótico. En lugar de ejecutar una secuencia fija de módulos, los sistemas agénticos pueden orquestar componentes de percepción, planificación y control en función del objetivo actual.
En vez de depender de pipelines de navegación estáticos, los robots empiezan a tratar sus propias capacidades como herramientas que pueden invocarse dinámicamente.
Cuatro capas técnicas de la navegación agéntica
La navegación robótica agéntica se construye sobre el stack tradicional, pero agrega una capa de orquestación que permite a los robots razonar sobre objetivos y coordinar subsistemas dinámicamente. En la práctica, estos sistemas operan en cuatro capas técnicas clave.
1. Percepción y fusión de sensores
Los robots primero necesitan entender de manera confiable lo que los rodea. Las plataformas modernas combinan múltiples modalidades de sensado:
- Lidar para medición precisa de distancia
- Cámaras RGB para percepción visual
- Sensores de profundidad para conciencia espacial
- IMU (unidades de medición inercial) para seguimiento de movimiento
- Radar para sensado robusto en condiciones de baja visibilidad
Los algoritmos de fusión combinan estas señales en una representación consistente del entorno. Los frameworks agénticos extienden esa capacidad al permitir que los módulos de percepción sean invocados dinámicamente según el contexto de la tarea.
2. SLAM (Simultaneous Localization and Mapping)
SLAM sigue siendo capacidad fundacional para robots móviles autónomos (AMRs). Les permite construir mapas de entornos previamente desconocidos y estimar su posición dentro de esos mapas. Investigación reciente combina SLAM con machine learning y percepción semántica para que los robots reconozcan objetos y rasgos del entorno mientras mapean. Los sistemas agénticos mejoran este proceso al seleccionar estrategias de mapeo dinámicamente y actualizar los mapas de manera continua durante la exploración.
3. Planificación y razonamiento
Los sistemas de navegación tradicionales usan algoritmos como A\* o Dijkstra para planificar rutas. Las arquitecturas agénticas introducen capacidades de razonamiento de mayor nivel: planificación multi-paso, descomposición de objetivos y estrategias adaptativas de exploración. Algunos frameworks emergentes integran modelos vision-language (VLMs) con agentes de planificación para razonar sobre tareas de navegación usando información semántica del entorno.
4. Control y ejecución del movimiento
Una vez determinada la ruta, los robots ejecutan el movimiento usando planificadores, optimizadores de trayectoria y algoritmos de evitación de colisiones, todos procesando feedback de sensores en tiempo real.
¿Cómo se integra la IA agéntica con ROS y los stacks existentes?
La IA agéntica no reemplaza la infraestructura robótica tradicional. Actúa como capa de orquestación que coordina módulos existentes dentro del sistema, lo que permite a los desarrolladores mejorar la autonomía sin rediseñar el stack completo.
La mayoría de los robots modernos usa middleware como ROS o ROS2 para gestionar la comunicación entre módulos de percepción, planificación y control. Los frameworks agénticos típicamente operan por encima de esos sistemas como capas de control cognitivo o planificadores de tareas. Interactúan con la infraestructura a través de interfaces y APIs estándar usados en plataformas como ROS, ROS2, NVIDIA Isaac y entornos de simulación como Gazebo o Isaac Sim.
Arquitectura basada en herramientas
Los sistemas agénticos tratan cada capacidad robótica como una herramienta invocable cuando se necesite. Las herramientas comunes en un stack de navegación incluyen módulos de SLAM y mapeo, sistemas de detección de objetos, algoritmos de path-planning, controladores de movimiento y servicios de consulta de mapas. En lugar de correr esos módulos en secuencia fija, el agente los selecciona dinámicamente según las condiciones del entorno y los objetivos de la tarea.
Flujos de trabajo dinámicos
Un robot puede observar su entorno, evaluar su objetivo, consultar el mapa, generar rutas candidatas y elegir la más segura antes de moverse. Esta coordinación dinámica mejora la robustez cuando los robots se topan con entornos desconocidos o cambiantes.
Navegación en entornos sin mapa o dinámicos
La navegación autónoma se vuelve mucho más desafiante cuando los robots operan en entornos con obstáculos en movimiento, layouts desconocidos o mapas incompletos. La IA agéntica ayuda a sortear esas limitaciones al permitir a los robots razonar sobre su entorno y adaptar su comportamiento.
Decisiones conscientes del contexto
Los sistemas agénticos interpretan datos de sensores y señales del entorno para tomar decisiones de navegación en tiempo real. En lugar de seguir una ruta predefinida, un agente evalúa contexto mediante context engineering para determinar dónde explorar, cuándo un obstáculo requiere reruteo y cómo deben adaptarse las estrategias de navegación a nueva información.
Estrategias de exploración
En entornos no mapeados, los robots deben explorar y al mismo tiempo construir comprensión del espacio. Los frameworks agénticos soportan creación incremental de mapas, exploración guiada por objetivos y planificación de rutas durante la exploración misma.
Adaptación a entornos dinámicos
Los sistemas de navegación basados en machine learning usan cada vez más modelos predictivos para anticipar obstáculos móviles y ajustar trayectorias. Esto permite operar de forma segura en torno a personas en bodegas, hospitales, rutas urbanas de delivery y sitios de respuesta a desastres.
Aplicaciones emergentes
A medida que la IA agéntica mejora la toma de decisiones y la conciencia del entorno de los robots, se abren nuevas aplicaciones que antes requerían ambientes estrictamente controlados.
- Robots móviles autónomos (AMRs): ya operan en bodegas y centros de fulfillment; con navegación agéntica pueden lidiar mejor con layouts cambiantes y espacios compartidos con humanos.
- Robots de servicio y domésticos: los hogares son altamente impredecibles, con muebles, objetos y conductas humanas que cambian todo el tiempo. La navegación basada en agentes combina percepción, razonamiento y contexto para navegar espacios desordenados.
- Robots de inspección industrial: monitorean fábricas, oleoductos y plantas de poder, donde aparecen pasajes estrechos, estructuras irregulares y condiciones cambiantes que el SLAM mejorado con IA puede sortear.
- Sistemas exploratorios: extensión natural a dominios donde el mapa no existe a priori y debe construirse mientras se navega.