Cualquiera que haya pasado tiempo trabajando con robots sabe que el proceso de desarrollo es complejo y muy lento. Sensores, motores e interfaces no se cablean ni se configuran solos, y hacer que todo conviva bien puede tomar días de debug. La sola idea de cambiar algo aterra a más de un roboticista, lo que es una pena, porque la experimentación rápida es esencial para que la disciplina avance.
Un nuevo dispositivo llamado link101, desarrollado por robocore, apunta a resolver ese problema. Es un puente open source multi-protocolo para robots que corren ROS 2. Con link101, todos los motores y sensores del robot son vistos por el computador como dispositivos Linux estándar a través de una única conexión USB-C. No hay drivers que instalar ni escribir: link101 se hace cargo de los detalles.
Un solo cable, muchos buses
En vez de malabarear una pila de adaptadores USB-a-UART y rezar para que Linux les asigne los mismos nombres tras cada reinicio, los desarrolladores conectan una sola placa que expone cada interfaz de forma independiente. Los dispositivos CAN, RS485, UART e I2C aparecen como interfaces Linux estándar con nombres estables, algo que facilita construir robots que combinan hardware de distintos proveedores.
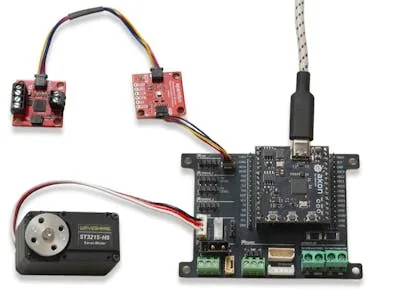
Un robot móvil típico puede llevar motores de rueda ODrive, servos Dynamixel para un brazo, actuadores Feetech para un soporte de cámara, un lidar UART y una IMU para navegación. Integrar esa mezcla normalmente implica pelearse con varios buses, adaptadores distintos y procedimientos de setup específicos por vendor. Con link101 esos dispositivos se conectan a la misma placa y hablan por un solo cable USB-C, dejando al desarrollador elegir el mejor hardware para cada tarea sin quedar atrapado por la compatibilidad de interfaces.
¿Qué trae por dentro link101?
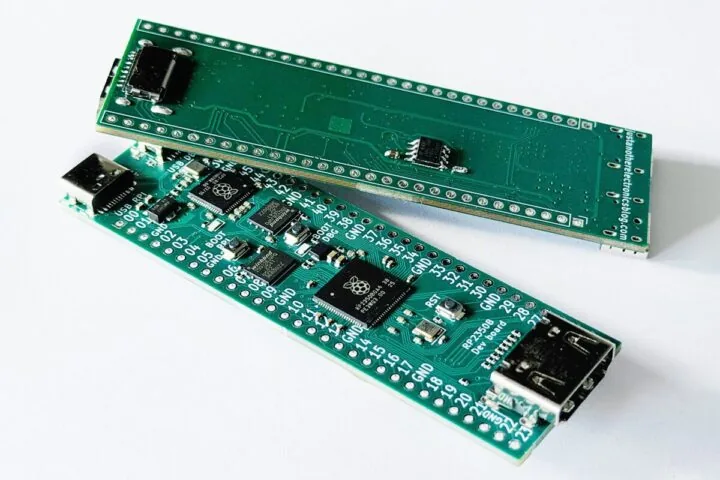
El hardware está construido en torno al microcontrolador Raspberry Pi RP2350 e incluye bloques dedicados para CAN-FD, RS485, UART half-duplex y full-duplex, más I2C con compatibilidad Qwiic y STEMMA QT. A eso se suma una IMU LSM6DSOTR de seis ejes on-board, pines GPIO, entradas ADC y NeoPixels de estado, lo que convierte a la placa en un hub de comunicaciones y también en una plataforma de desarrollo.
Dos modos de integración: transparente o standalone
Los desarrolladores pueden elegir qué tan profundo quieren integrar la placa en sus sistemas. En modo transparente, los drivers ROS 2 existentes, utilidades de vendor y configuraciones de ros2_control siguen funcionando sin modificación, porque link101 simplemente puentea el hardware a Linux.
En modo standalone se corre firmware específico de la aplicación directamente sobre el RP2350. Usando zenoh-pico sobre USB CDC, los loops de control de tiempo crítico se ejecutan en el microcontrolador en vez del computador anfitrión, reduciendo jitter de scheduling y mejorando el comportamiento determinista para aplicaciones robóticas exigentes.
Todo abierto: hardware, firmware, SDK
Los archivos de diseño de hardware, el firmware, los drivers de protocolo, los paquetes ROS 2 y un SDK para agregar nuevos protocolos van a liberarse en conjunto. Eso permite que desarrolladores construyan carrier boards a medida y aporten soporte de nuevos protocolos de vuelta a la comunidad. Los interesados pueden dejar su email en Crowd Supply para recibir aviso cuando link101 esté disponible: enlace al listado.