A mucha gente le gustan las persianas, pero pocos disfrutan la rutina de abrirlas y cerrarlas varias veces al día. Existen opciones de automatización comerciales, pero cuando vivís en un departamento arrendado, como es el caso del maker [Rooster Robotics], prefieres una solución menos invasiva y que no esté atada a la nube. Por eso decidió construir su propio driver para roller shades integrado con Home Assistant.

Los comentarios del video apuntan, con razón, que la premisa de que no existen alternativas comerciales sin cuenta cloud obligatoria es discutible: el Aqara Roller Shade Driver E1, por ejemplo, es un dispositivo Zigbee estándar que se integra con cualquier ecosistema de domótica. Aun así, tener un dispositivo propio que controlás de punta a punta sigue siendo un argumento válido, sobre todo cuando podés ajustar el firmware y entender exactamente qué hace cada función.
¿Cuál es el problema técnico de fondo?
Estos sistemas son engañosamente simples. El primer desafío es saber qué tan abierta está la persiana, dato necesario tanto para detenerla en una posición intermedia como para reportarla en el dashboard de Home Assistant. El segundo es mecánico: el motor tiene que quedar paralelo a la pared para evitar el típico bulto incómodo que sobresale varios centímetros.
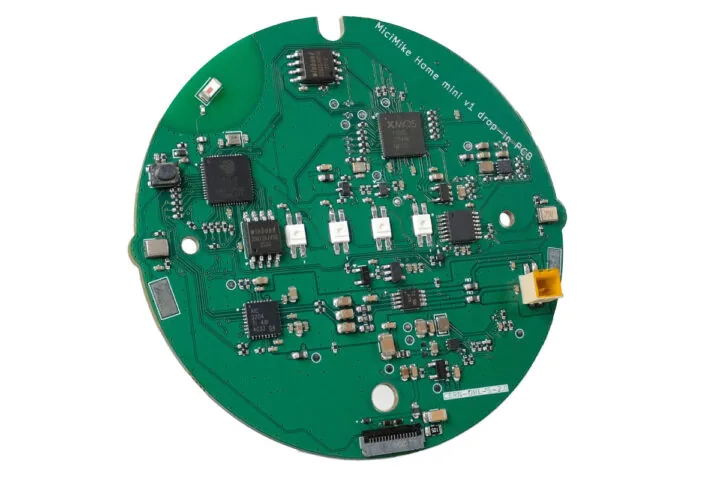
El primer prototipo intentó resolver la posición con un sensor de efecto Hall y varios imanes, mientras que el problema del montaje se atacó con engranajes en ángulo. Tras varias iteraciones, el diseño funcionó lo suficientemente bien como para justificar una PCB custom con un módulo ESP32-S3 para el control por WiFi.
¿Por qué cambió el sensor de efecto Hall por un AS5600?
En la versión final, el sensor de efecto Hall y la matriz de imanes fueron reemplazados por el AS5600 de ams-OSRAM, un encoder magnético rotatorio que requiere un único imán diametral. La ventaja es doble: el montaje se simplifica y la resolución angular es mucho más alta. El AS5600 entrega 12 bits de resolución (4.096 posiciones por vuelta) por bus I2C, lo que permite mapear con precisión cuántas vueltas dio el eje y, por extensión, calcular el porcentaje de apertura de la persiana.
¿Cuándo se libera el diseño?
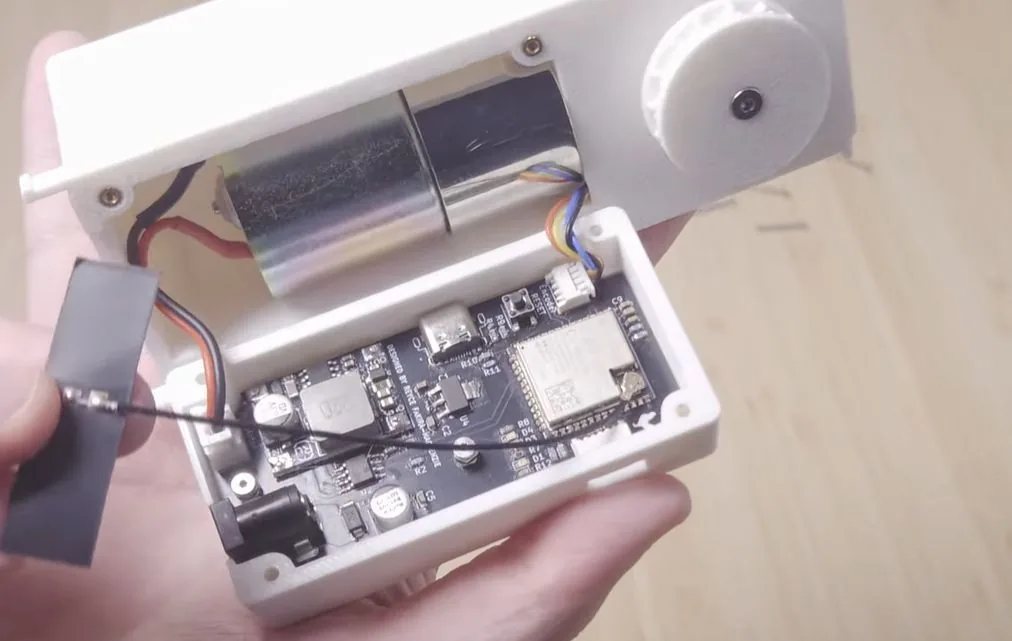
Por ahora los archivos de diseño no están publicados, pero Rooster Robotics adelantó que está evaluando liberarlos como open hardware en el futuro. Mientras tanto, los makers que quieran replicarlo tienen toda la receta visible en el video: PCB con ESP32-S3 como controlador principal, AS5600 como encoder de posición, un motor DC de bajo torque acoplado mediante engranajes en ángulo, e integración por WiFi con Home Assistant usando ESPHome o un firmware custom en Arduino.
Para alguien en Chile que quiera replicar el proyecto, el costo es modesto: un ESP32-S3 genérico desde USD 5, el AS5600 break-out alrededor de USD 4, un motor 6V con caja reductora cerca de USD 8 y el resto del herraje en cualquier ferretería. El total queda muy por debajo del Aqara E1, que en MercadoLibre Chile circula por sobre los CLP 70.000 incluyendo el hub Zigbee correspondiente.