Los tableros de ajedrez auto-jugables existen hace años, pero casi siempre con un patrón parecido: las piezas son estándar y se mueven por un electroimán bajo el tablero o por un brazo robótico externo. La elección tiene lógica, baja la complejidad y permite reusar piezas comerciales. La pregunta que se hizo el maker 3DprintedLife fue distinta: ¿y si cada pieza pudiera moverse sola?
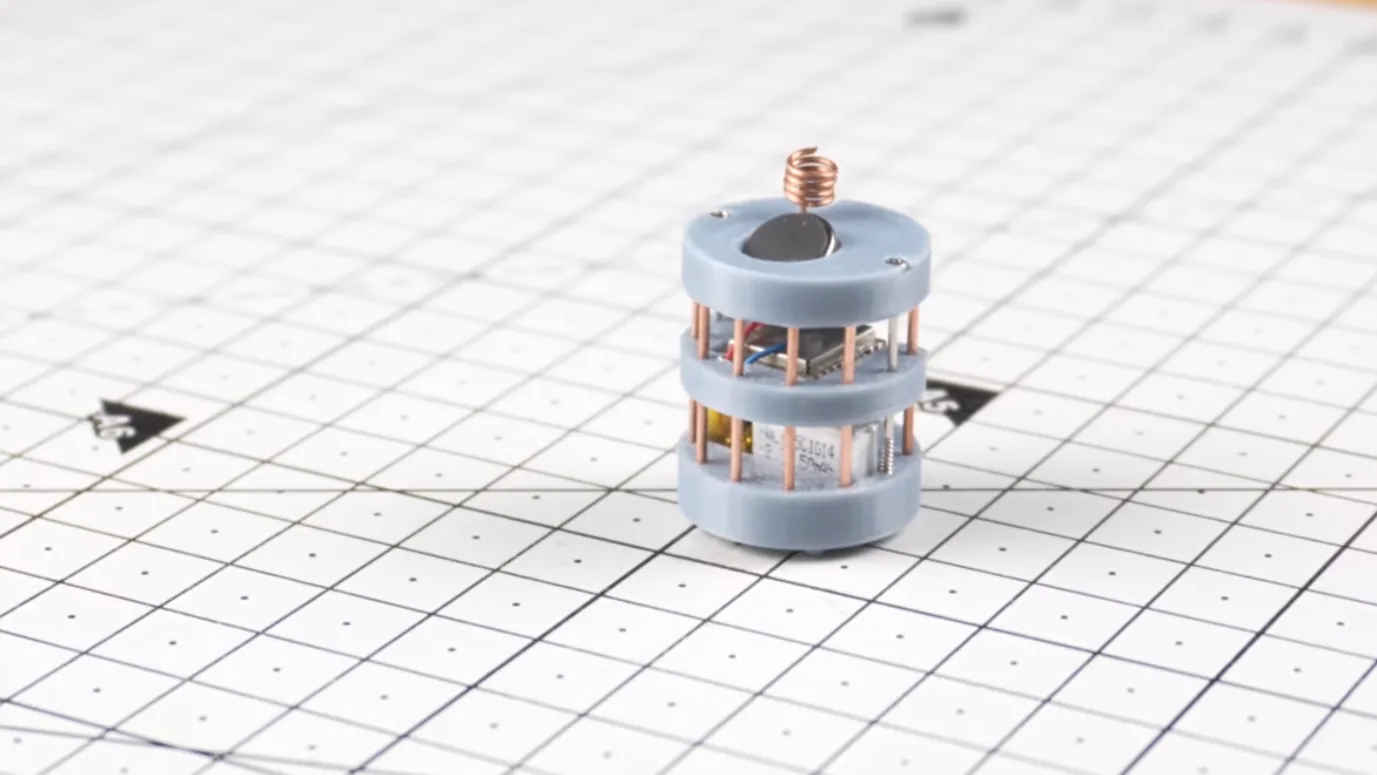
El resultado se llama MiniBot: piezas impresas en 3D que son, a la vez, micro-robots. Técnicamente no es la primera implementación —ya existe el producto comercial Chessnut Move—, pero al ser un proyecto open hardware con código fuente liberado en GitHub se vuelve interesante para hackers y educación. El diseño además es genérico: el mismo formato podría usarse para aplicaciones distintas a un ajedrez.
¿Qué hay dentro de cada MiniBot?

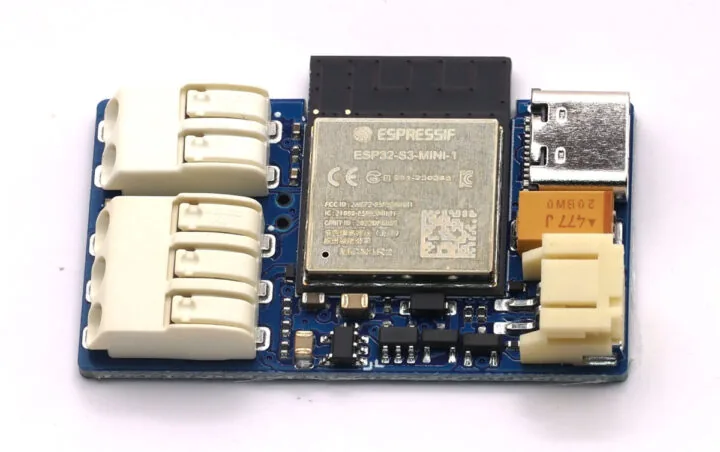
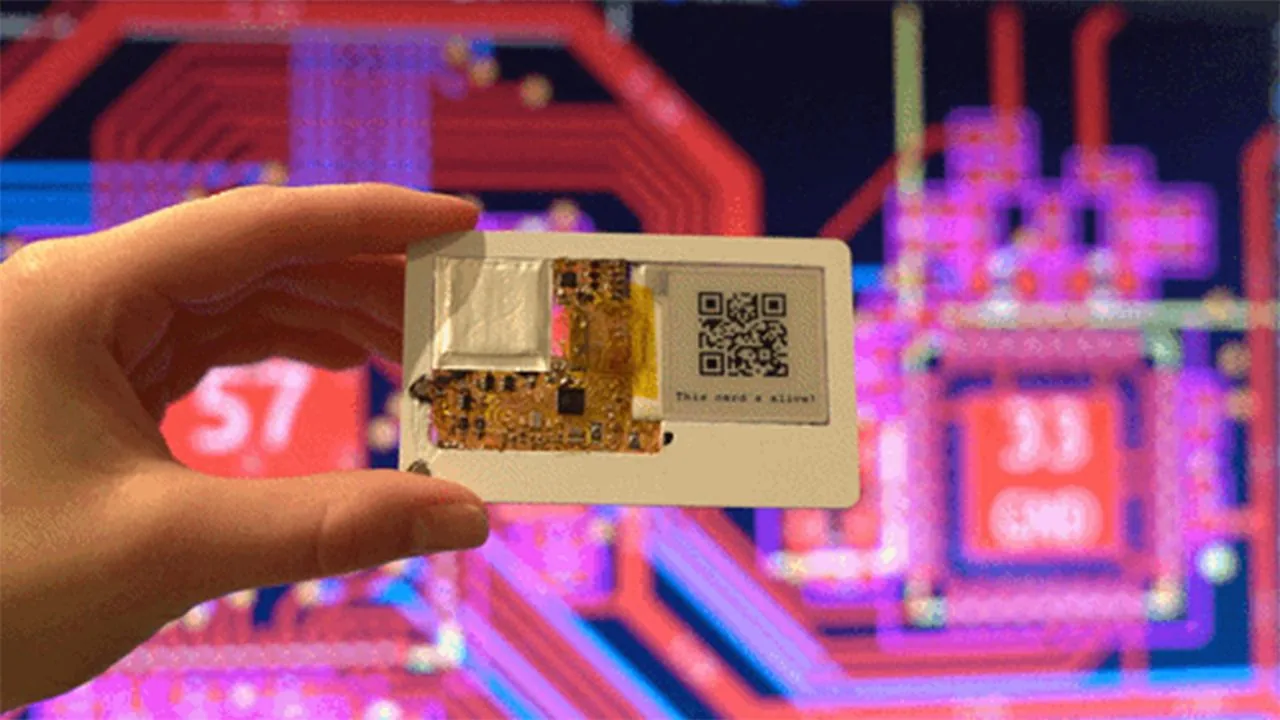
Cada pieza es una PCB custom apretada con todo lo necesario para moverse y comunicarse sola:
- MCU: módulo ESP32-C3 (núcleo RISC-V a 160 MHz, con WiFi 2.4 GHz y BLE).
- Motores: dos miniaturas stepper PMO8-2 con sus drivers correspondientes.
- Sensor: un magnetómetro para localización absoluta.
- Batería: LiPo de 170 mAh.
- Radio: comunicación con el hub mediante ESP-NOW, con un canal dedicado por pieza para evitar colisiones.
ESP-NOW es la pieza clave de la elección. El protocolo propietario de Espressif corre sobre 2.4 GHz pero no requiere asociación WiFi, lo que reduce la latencia y baja el consumo eléctrico —importante cuando alimentás todo desde una batería del tamaño de una moneda—. Cada MiniBot conserva su propio canal para que la coordinación del hub no se vuelva un cuello de botella.
¿Cómo se localizan las piezas en el tablero?
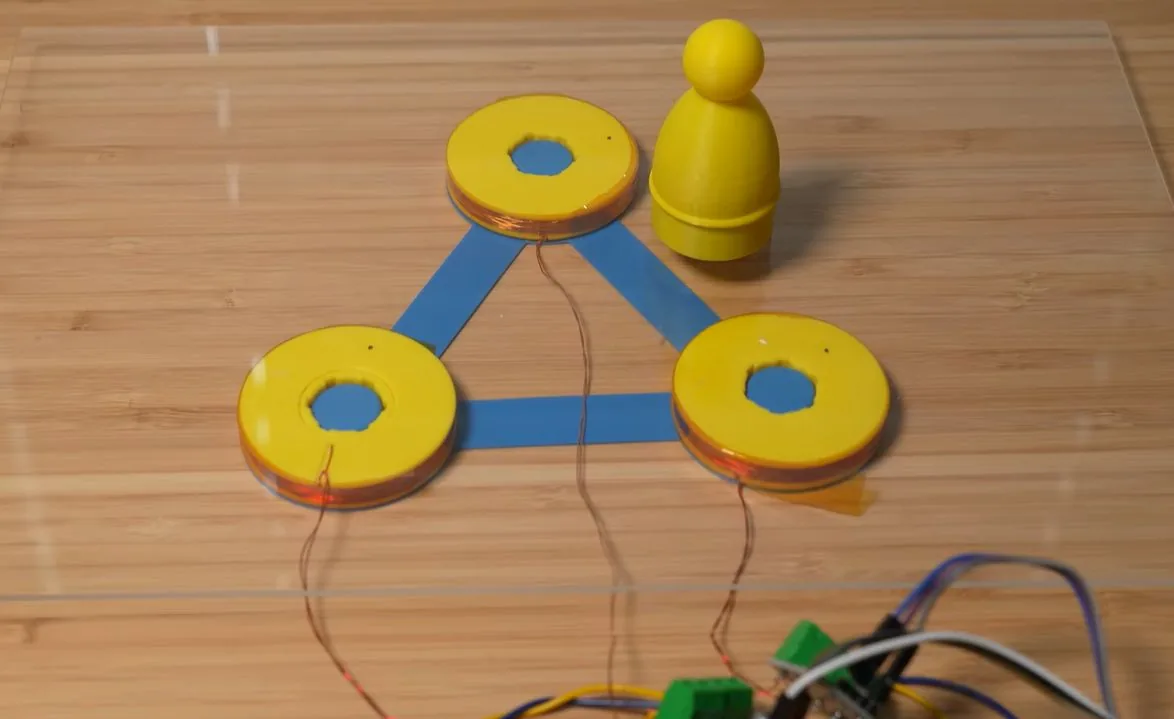
La parte más ingeniosa del diseño está en el tablero, no en las piezas. El tablero embebe una matriz de electroimanes que se activan secuencialmente. Mientras cada MiniBot atraviesa el escaque, su magnetómetro lee la intensidad del campo magnético y, triangulando las lecturas entre múltiples electroimanes activados, calcula su posición absoluta sobre el tablero.
Es una solución elegante: evita cámaras cenitales, marcadores fiduciales o encoders en las ruedas. Y deja que la sincronización de turnos quede a cargo del software del hub.
¿Qué corre en el hub central?
El hub tiene una arquitectura mixta:
- Un ESP32-C3 en la placa principal se encarga del enlace ESP-NOW con todas las piezas.
- Una Raspberry Pi SBC conectada vía enlace serial maneja el software principal en Python: motor de reglas de ajedrez, planificación de trayectoria y coordinación de turnos.
La separación de roles hace que el ESP32 actúe como gateway radio y la Pi como cerebro lógico, dividiendo carga de manera coherente con lo que ambos chips hacen mejor.
¿Funciona ya?
El video muestra un prototipo básico funcionando, pero con peros. El ESP32-C3 single-core del MiniBot tropieza con el firmware cuando tiene que controlar dos motores, leer el magnetómetro y mantener la radio activa simultáneamente. El maker reconoce que en la próxima iteración habrá cambios al firmware, además de mejoras en el ahorro de energía y un método más simple de recarga de las baterías.
Es la clase de proyecto donde el plan B siempre es ESP32-S3 (dual-core, mejor margen para tareas en paralelo) o reescribir el firmware con FreeRTOS y separar tareas en cores distintos. Igual, como demostración del concepto, MiniBot ya valida la arquitectura.
¿Por qué importa para makers chilenos?
El proyecto sirve como caso de estudio para varios temas que aparecen en cursos universitarios y maker spaces de Chile: localización por sensores magnéticos, coordinación distribuida con ESP-NOW, diseño mecánico para PCBs pequeñas, y uso eficiente del costoso enlace radio. El ESP32-C3 está disponible en MercadoLibre Chile desde CLP 4.000-6.000 (USD 4-7) en formato módulo, y la Raspberry Pi 5 ronda los CLP 90.000-100.000 importada. El hardware base de la versión mínima del proyecto sale bajo los CLP 200.000 sin contar los stepper especializados.
Para quienes quieran replicarlo: el repo en GitHub incluye esquemáticos KiCad, código fuente del firmware y del software del hub, e instrucciones de impresión 3D de las carcasas. El uso de ESP-NOW + matriz magnética también es transferible a aplicaciones más allá del ajedrez: educación STEAM, juegos de mesa motorizados, robots cooperativos para coreografías o instalaciones de arte.