Brain Corp anunció esta semana una colaboración de investigación ampliada con la Universidad de California, San Diego. El acuerdo apunta a avanzar el mapeo semántico y las tecnologías de inteligencia contextual para robots autónomos que operan en entornos comerciales e industriales complejos.
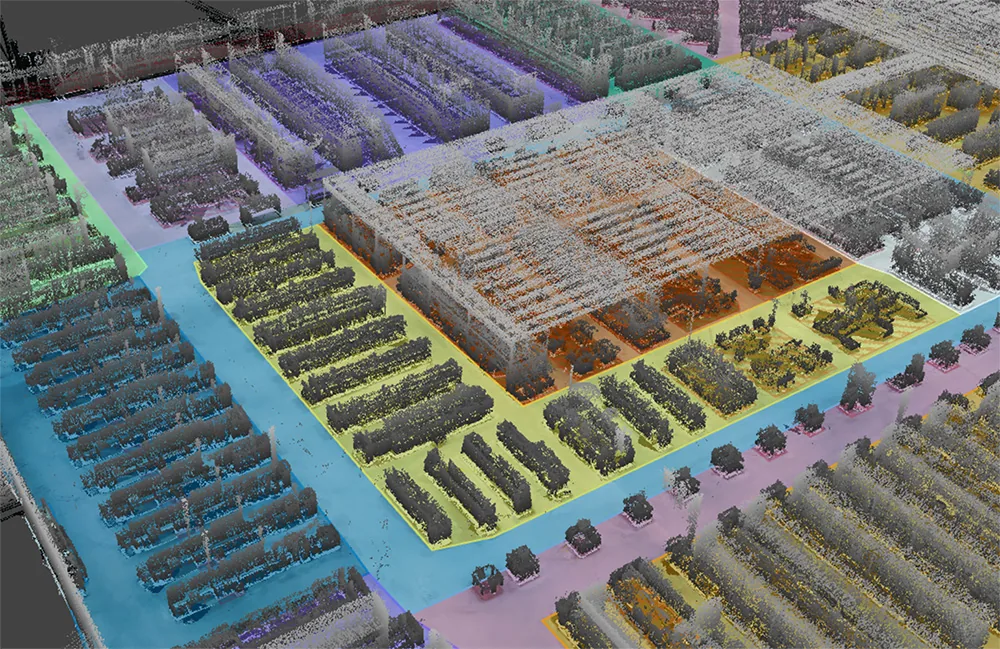
La idea central es construir lo que Brain Corp denomina una contextual grounding layer: una representación digital inteligente del espacio físico que dé a robots, drones y vehículos autónomos la conciencia situacional necesaria para entender qué pasa a su alrededor y reaccionar de forma intuitiva.
¿Por qué los mapas no alcanzan?

El Dr. Nikolay Atanasov, académico del Departamento de Ingeniería Eléctrica y Computacional de la Jacobs School of Engineering en UC San Diego, dirige la investigación desde la Existential Robotics Laboratory que lidera. Su explicación marca el punto de quiebre técnico que la industria enfrenta hoy.
"La localización y mapeo simultáneos, o SLAM, ayudó a sacar a los robots de los entornos industriales fijos hacia escenarios más dinámicos", dijo Atanasov. "Hoy la industria está explorando sistemas de IA que operan directamente sobre datos visuales, pero creemos que los mapas semánticos 3D contextuales siguen siendo esenciales para una autonomía robusta en espacios físicos complejos".
La crítica de fondo es a las apuestas full-VLA (vision-language-action). Modelos como los que NVIDIA presentó en su stack GR00T o los que startups del Bay Area entrenan sobre datos de video puro son atractivos, pero todavía no logran la consistencia que un robot necesita para no chocar contra un cliente despistado en un pasillo de supermercado.
La escala de Brain Corp como ventaja
La colaboración no parte de cero. Brain Corp llega con un activo difícil de replicar para una universidad: más de 50.000 robots móviles autónomos (AMRs) desplegados globalmente y más de 25 millones de horas acumuladas de operación en sitios comerciales. Esos datos cubren cambios reales de luz, obstáculos imprevistos, multitudes, derrames y errores humanos que ningún simulador captura del todo.
Esa base alimenta a BrainOS, la plataforma de autonomía de la empresa. La meta del acuerdo con UC San Diego es integrar el trabajo académico en mapeo semántico y contextual grounding directamente en BrainOS, para que clientes industriales puedan desplegar y coordinar AMRs con mejor comprensión del entorno.
La voz del lado industrial
John Black, CTO de Brain Corp, presentará la estrategia en el Robotics Summit & Expo 2026 de Boston la próxima semana. Su charla, "Building Scalable Robot Systems That Learn, Adapt, and Earn Trust", promete una visión detrás de escena del enfoque.
"La robótica llegó a un punto donde el desafío ya no es simplemente movimiento o percepción, sino comprensión", dijo Black en el comunicado. "La industria entra en una nueva era de robótica impulsada por IA, pero desplegar estos sistemas de forma segura y confiable en entornos reales requiere una capa mucho más profunda de inteligencia contextual".
¿Y para LatAm?
Brain Corp ya tiene presencia indirecta en Chile, México y Brasil a través de partners como SoftBank Robotics y los AMRs de limpieza que despliegan grandes cadenas de supermercados regionales. La Existential Robotics Laboratory, por su parte, publica software open source que cualquier laboratorio universitario chileno puede incorporar a su pipeline: el ROS 2 stack de semantic SLAM del grupo de Atanasov está disponible en GitHub con licencia BSD-3, y corre sobre hardware accesible como un Jetson Orin Nano de USD 499.
Para integradores locales que arman flotas de robots de inventario o limpieza, la pregunta práctica es si BrainOS abrirá APIs para que terceros consulten esa capa de mapeo semántico. Por ahora la respuesta es que no, pero la presión competitiva de NVIDIA, Boston Dynamics y los humanoides chinos puede forzar una apertura parcial en 2027.