Los orígenes del Shadow Walker
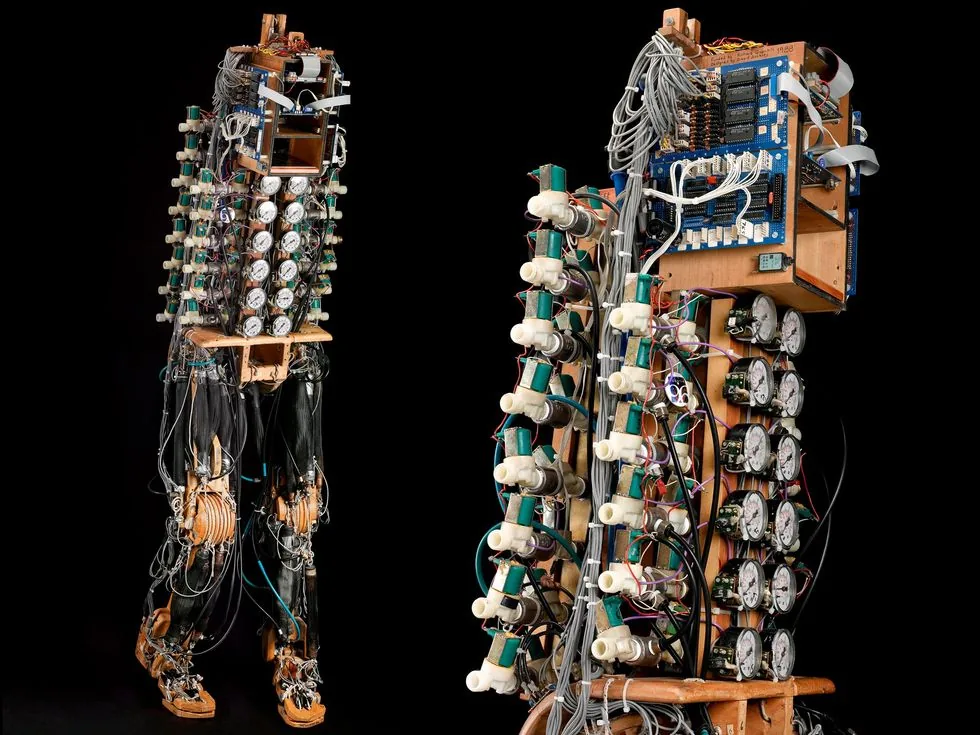
El Shadow Walker fue un robot humanoide sin cabeza ni brazos, construido por un grupo de entusiastas de la robótica a finales de la década de 1980. En 1987, Richard Greenhill, un fotógrafo británico fascinado por la robótica pero sin formación técnica formal, decidió que quería construir un humanoide de tamaño real capaz de realizar tareas útiles, como cargar equipaje. Trabajaba en una startup llamada Intergalactic Robots, pero al no convencer a sus colegas de construir tal máquina, decidió emprender el proyecto por su cuenta desde su ático.

Para avanzar con su visión, organizó reuniones semanales con cerca de una docena de personas con intereses similares. Cada miércoles por la noche, su esposa, Sally, preparaba una gran olla de espaguetis, mientras el grupo experimentaba con componentes rescatados de impresoras antiguas y piezas obtenidas en depósitos de chatarra. Se autodenominaron el "Shadow Group". Con el tiempo, construyeron varios robots distintos, pero su proyecto principal fue el Shadow Walker de dos piernas.

El amigo de Greenhill, David Buckley, un experto en robótica y animatrónica a quien conoció en Intergalactic, esbozó un diseño preliminar basado en libros de texto médicos sobre la estructura ósea y el movimiento muscular humano. El esqueleto del robot, fabricado en madera de arce, estaba sumamente simplificado: presentaba un solo hueso en la parte inferior de la pierna y un único dedo ancho en cada pie. El diseño de doble eje del tobillo permitía dos grados de movimiento, mientras que la rodilla carecía de rótula para simplificar la mecánica.
¿Cómo se lograba el movimiento sin motores eléctricos?
Greenhill no quería que el robot utilizara motores convencionales; en su lugar, el movimiento se controlaba mediante aire comprimido para expandir y contraer 28 "músculos de aire". Esta era su versión de los músculos McKibben, inventados en la década de 1950 para imitar la musculatura mediante sistemas neumáticos. Estos músculos estaban conectados a los huesos a través de ocho articulaciones (caderas, rodillas, tobillos y dedos), proporcionando un total de 12 grados de libertad.
El torso, carente de cabeza, albergaba las válvulas de control, los componentes electrónicos y las interfaces de computadora. El robot medía 168 centímetros de altura, 46 cm de ancho y pesaba aproximadamente 38 kilogramos. El grupo logró que el robot permaneciera de pie de forma fiable y se equilibrara; incluso podía recuperar su centro de gravedad si era empujado ligeramente. Sin embargo, lograr que caminara resultó ser un desafío mucho mayor.
Rich Walker se unió al grupo siendo adolescente y comenzó a escribir el software necesario para estabilizar al robot. Tenía un interés particular en utilizar redes neuronales para resolver los problemas de equilibrio, aunque se enfrentó a numerosos obstáculos de hardware, incluyendo la falta de fiabilidad de los sensores y las válvulas, además de la fragilidad general del robot. Con el paso del tiempo, Walker y el equipo desarrollaron una biblioteca estándar de rutinas para controlar el robot. Walker escribió una descripción detallada del Shadow Walker en 1999, la cual está disponible en el sitio web de David Buckley.
El contexto de la robótica en los años 80
Para cuando el Shadow Group comenzó a desarrollar el Shadow Walker, ingenieros del ámbito académico e industrial ya habían trabajado en robótica durante varias décadas. El primer robot industrial del mundo, el Unimate, debutó en 1961, y en 1967 Donald Michie y otros comenzaron a construir una serie de robots Freddy para investigar la inteligencia artificial. El IEEE creó su primera organización dedicada a la robótica en 1984 al establecer el IEEE Robotics and Automation Council, que se convirtió en la IEEE Robotics and Automation Society en 1987. Ese mismo año, se fundó la International Federation of Robotics para promover la investigación, el desarrollo y la cooperación en el campo.

Mientras el Shadow Walker desafiaba los límites de un robot humanoide construido por aficionados, los humanoides industriales también ganaban terreno. En 1986, Honda comenzó a trabajar en sus robots experimentales (serie E) y posteriormente en los prototipos (serie P), revelando finalmente el P2 en 1996. El P2 medía 183 cm de altura y pesaba 210 kg, siendo el primer humanoide capaz de caminar de forma estable y autónoma. Este trabajo condujo eventualmente al desarrollo del innovador ASIMO.
En la década de 1980, el público se sentía fascinado y a la vez horrorizado por el potencial de los robots. Las empresas veían en ellos una forma de aumentar la productividad, mientras que los trabajadores temían por sus empleos. Los niños los consideraban juguetes maravillosos, mientras que las personas con discapacidad los veían como herramientas de liberación. Los expertos militares esperaban que los robots libraran guerras sin poner en peligro a soldados humanos, mientras que los filósofos debatían si los robots desafiarían nuestras nociones de inteligencia y estupidez.

Vía IEEE Spectrum.