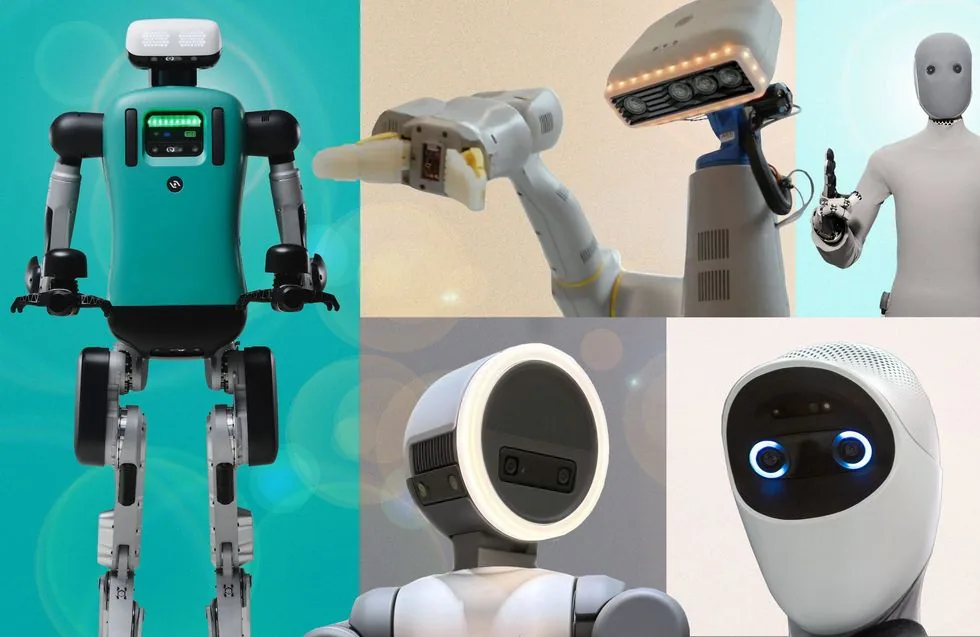
El robot en la feria parece moverse sin esfuerzo. Se desplaza hacia un contenedor, identifica el objeto, mete la mano y deposita el item exactamente donde corresponde. La audiencia asiente. Los inversionistas toman notas. Los ingenieros celebran. Después el robot llega a destino y el mundo deja de comportarse como en el demo.
Esa brecha entre demo y despliegue sigue siendo uno de los desafíos más persistentes de la robótica. Máquinas que rinden hermoso bajo condiciones controladas suelen tropezar con luz cambiante, superficies reflectantes, materiales transparentes, personas en movimiento y tráfico de grúas horquilla.
Los robots no necesitan ver como los humanos. La percepción robótica debe ser confiable, específica a la tarea y medible bajo condiciones reales de operación.
¿Qué pasa fuera del laboratorio?

Las condiciones de laboratorio suelen favorecer al stack de percepción. La iluminación, la posición de los objetos y los fondos están controlados, y al robot se le da toda la ventaja. Los ambientes del mundo real no conceden ninguno de esos favores. Los pisos de bodega, los pasillos de hospital y las líneas de manufactura introducen luz cambiante, superficies reflectantes, personas en movimiento, vibración y variación de materiales.
Cada una de esas variables puede exponer una debilidad que nunca apareció en el demo. Lo que se ve como una falla de planificación o manipulación puede empezar en el sensado, la calibración o una estimación pobre de confianza. Un robot no puede planificar de manera confiable alrededor de un mapa de profundidad que está convencido pero equivocado.
Las cámaras 2D tradicionales siguen siendo útiles para reconocimiento, inspección y tracking. Pero una imagen 2D no mide profundidad. La profundidad se puede inferir desde movimiento, priors aprendidos o geometría multivista, pero esas estimaciones suelen quebrarse cuando cambian iluminación, textura, oclusión o materiales.
Por eso los sistemas de visión 3D, las cámaras de profundidad y la fusión de sensores se volvieron centrales para el despliegue robótico. Los robots necesitan mediciones espaciales del mundo físico, no adivinanzas más inteligentes sobre imágenes planas.
¿La profundidad es una sola tecnología?

La visión robótica recorrió varias generaciones de tecnología de sensado, cada una resolviendo algunos problemas e introduciendo otros.
Los primeros sistemas de visión robótica dependieron fuertemente de cámaras 2D apareadas con entornos altamente estructurados. Los robots de línea de ensamble trabajaban con piezas fijas en posición, orientación e iluminación. En muchos casos la inteligencia estaba en el dispositivo de sujeción, no en el sensor.
Los sistemas de luz estructurada proyectan un patrón conocido sobre una escena y estiman profundidad leyendo cómo se deforma ese patrón. Esta aproximación puede funcionar bien para inspección y medición de interiores. Sin embargo, es sensible a la luz ambiente, al movimiento, a superficies reflectantes o transparentes y a la interferencia con otros emisores activos.
La visión estéreo usa dos cámaras desplazadas para estimar profundidad. Al hacer matching de puntos correspondientes entre las dos imágenes, el sistema estima la disparidad y la convierte en profundidad. El estéreo pasivo depende de textura y luz; el estéreo activo agrega proyección infrarroja para escenas de baja textura. Los sistemas estéreo pueden escalar bien para robótica, pero importan la textura baja, los patrones repetitivos, el blur por movimiento, la oclusión, los materiales reflectantes y los compromisos de rango.
La tecnología tiempo de vuelo (ToF) estima distancia a partir de la luz infrarroja que retorna. Las cámaras ToF pueden ser compactas, rápidas y útiles para profundidad densa, pero la luz infrarroja ambiente, las reflexiones multitrayectoria, las superficies reflectantes y la ambigüedad de rango pueden distorsionar resultados.
La conclusión práctica es simple: ningún sensor es universalmente el mejor. Luz estructurada, estéreo, ToF, lidar, cámaras RGB y unidades de medición inercial (IMUs) tienen roles útiles. La elección correcta depende de la tarea, el rango, la iluminación, los materiales, el movimiento, el cómputo, las necesidades de seguridad y la tolerancia a fallas.
¿La IA puede compensar las limitaciones del sensor?
Es tentador asumir que la IA puede compensar los límites de los sensores. La IA puede mejorar sustancialmente la percepción robótica. Puede limpiar ruido en los mapas de profundidad, llenar huecos, fusionar RGB y profundidad, estimar pose y hacer tracking de movimiento.
La IA sigue dependiendo de datos físicos confiables. Un robot necesita estimaciones de profundidad lo suficientemente correctas para actuar sobre ellas. La diferencia importa cerca de personas, mercadería cara o maquinaria.
Para despliegue, la percepción necesita medición, incertidumbre, validación y degradación elegante. Si un sensor se satura, pierde textura, ve a través del vidrio, recibe reflexiones multitrayectoria o se descalibra, el sistema debería reconocer la confianza reducida en vez de pasar silenciosamente geometría incorrecta aguas abajo.
En robótica, una falla de percepción que se ve confiada suele ser más peligrosa que una que falla visiblemente.
¿Qué exige el despliegue del mundo real?
El despliegue es donde tienden a aparecer los problemas difíciles. Un robot puede rendir bien en integración y después fallar en casos borde que el laboratorio se perdió: caucho negro, packaging brillante, film transparente, puertas con sol directo, vibración, polvo o cámaras activas de profundidad superpuestas.
Los equipos de despliegue deberían evaluar los sistemas de percepción contra el sobre completo de operación. La pregunta real es si el stack de percepción puede producir información espacial confiable bajo las condiciones que importan para la tarea.
La evaluación debe cubrir precisión de profundidad, latencia, deriva de calibración, carga de cómputo, ajuste mecánico y resistencia a polvo, vibración e interferencia. También debe probar superficies brillantes, oscuras, transparentes, metálicas y de baja textura.
La iluminación debe tratarse como variable, no como un supuesto de fondo. Un sistema que funciona bajo iluminación interior controlada puede comportarse distinto bajo sol directo, fuentes LED mixtas, parpadeo, sombras o interferencia infrarroja cercana. La operación con múltiples cámaras también se debe validar, especialmente cuando hay iluminación activa involucrada.
La preparación para despliegue viene de un rendimiento repetible a lo largo de la distribución real de condiciones de operación, incluyendo los casos incómodos que rara vez aparecen en un video de demo pulido.
¿Qué viene en percepción de máquinas?
A la industria robótica no le falta ambición. Robots humanoides, bodegas autónomas, logística hospitalaria y automatización de fábricas dependen todas de máquinas que puedan percibir el mundo físico de forma confiable como para actuar en él.
El futuro de la percepción robótica vendrá de mejor sensado de profundidad, fusión de sensores y calibración y validación online. Los sistemas estéreo seguirán mejorando a través de algoritmos de matching más fuertes y procesamiento neuronal. Los sistemas ToF se beneficiarán de mejores esquemas de modulación, mitigación de multitrayectoria, rango dinámico y fusión de sensores.
La luz estructurada seguirá siendo valiosa en medición e inspección controladas de corto alcance. RGB, profundidad, lidar, IMU, sensado táctil y modelos semánticos van a trabajar cada vez más juntos en lugar de competir como tecnologías aisladas.
El progreso más importante puede ser menos glamoroso que un algoritmo nuevo: sistemas de percepción que saben cuándo están inseguros, degradan elegantemente y exponen información útil de confianza a la planificación y al control. La percepción robótica necesita suficiente precisión, velocidad y conciencia de incertidumbre para sostener la tarea.
Hacer que el despliegue se parezca al demo empieza por construir percepción para el mundo que los robots realmente enfrentan, no para el mundo en el que desearíamos que operaran.
Sobre el autor
David Chen es doctor en mecánica de la ingeniería, con especialización en sistemas de medición óptica. Desarrolla cámaras RGB+Depth desde 2009 y, desde que se sumó a Orbbec Inc. en 2013, contribuyó al lanzamiento global exitoso de más de 10 productos. Orbbec ofrece productos que abarcan luz estructurada, visión estéreo, ToF y lidar; según la compañía, sus sensores operan en robots y sistemas de manufactura, logística, retail, escaneo 3D, salud y fitness.