NVIDIA acaba de anunciar el Isaac GR00T Reference Humanoid Robot en un comunicado de prensa a medio cocer para Computex 2026, con un "workflow de referencia disponible pronto" y disponibilidad estimada para fines de año junto al chassis humanoide Unitree H2.
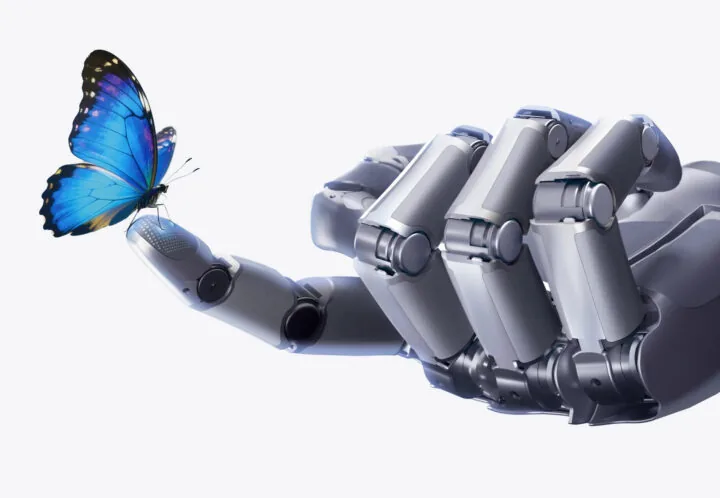
Uno de los componentes del kit que ya parece estar disponible, aunque en cantidad limitada, es la Sharpa Wave, una mano robótica dexterous high-end con 22 grados de libertad (DoF) y un arreglo táctil dinámico (DTA) en cada dedo, capaz de percibir objetos tan livianos como una mariposa.
¿Qué especificaciones trae la Sharpa Wave?
Aspectos destacados de la mano robótica Sharpa Wave:
- Escala 1:1 humana: la razón entre el ancho de la palma y el largo de la mano es aproximadamente 0,618, permitiendo a la Wave manipular las mismas herramientas que un humano.
- 22 grados de libertad activos: diseño isomórfico que replica la mano humana.
- Arreglo Táctil Dinámico (DTA) impulsado por un algoritmo propietario basado en redes neuronales y módulos de sensado que habilitan la detección de objetos finos (como una mariposa).
- Fuerza máxima en la yema de los dedos: 20 N.
- Diámetro mínimo de agarre: 10 mm.
- Repetibilidad de posición en la yema: ±1 mm.
- Frecuencia de control: 500 Hz.
- Velocidad de movimiento en todos los gestos: > 4 Hz.
- 5 dedos, cada uno con un sensor táctil y un sensor de torque.
- Interfaz de host: Gigabit Ethernet.
- Voltaje de suministro: 18-28 V DC.
- Consumo: 15 W (estático), hasta 180 W (pico transiente).
- Dimensiones: 208 × 90 × 50 mm.
- Peso: 1,3 kg.
- Durabilidad y protección: test de presión validado en 2,5 millones de iteraciones; test de fricción en yemas verificado sobre 4.000 km; cientos de impactos sin daño; shock a 3.200 ciclos con aceleración de 30 g; cierre protector automático en 0,10 segundos; más de 1.000 horas de operación continua en test de tipo dedo en movimiento.

Vista explotada del arreglo táctil dinámico. Caja de conexión con conector custom (A), Gigabit Ethernet (B), jack DC (C) y conector de potencia XT-30 (D).
¿Cómo se programa y simula la mano?
La Sharpa Wave está pensada para investigación en embodied AI e integración en robots; la empresa entrega paquetes ROS2, assets de simulación URDF/MJCF para MuJoCo, y soporta los lenguajes C++ y Python sobre hosts macOS y Linux. Hay más detalle técnico e instrucciones para empezar en el sitio de documentación.

Simulador para desarrolladores.
La mejor manera de entender el rendimiento de las manos Sharpa Wave probablemente es ver la demo de teleoperación en que la mano arma una bolsa de basura, pela un huevo y toma una foto con un smartphone.
Si en cambio prefieres una presentación técnica sobre la mano y la tecnología, conviene revisar el video de 28 minutos.
¿Y el precio?
La página de producto no entrega precio y, en su lugar, invita a las empresas interesadas a contactar al equipo de ventas. Sin embargo, una entrevista en 36kr Europe mencionó un precio cercano a USD 50.000 por mano, y a fines de 2025 solo era posible probar la mano visitando sus oficinas en Shanghai. Este tipo de mano está hecha de engranajes diminutos, lo que recuerda al diseño de los relojes suizos caros, pero solo cabe esperar que los precios bajen: con dos manos en el Isaac GR00T Reference Humanoid Robot, un kit completo terminaría costando entre USD 150.000 y USD 200.000. Al menos así queda claro por qué una mano robótica de USD 699 ya se considera de gama media.