El cuadrúpedo Unitree Go2 tiene seguidores principalmente por su precio agresivo. Pero quizás más interesantes que el robot son los motores que lo propulsan: aparentan ser similares a los GO-M8010-6 del Go1 que Unitree también vende por separado. Thomas Flayols está trabajando en reverse-engineering del driver propietario de esos motores, usando la documentación pública del modelo anterior y un trabajo paciente de ingeniería inversa.
¿Qué hay adentro del motor del Go2?
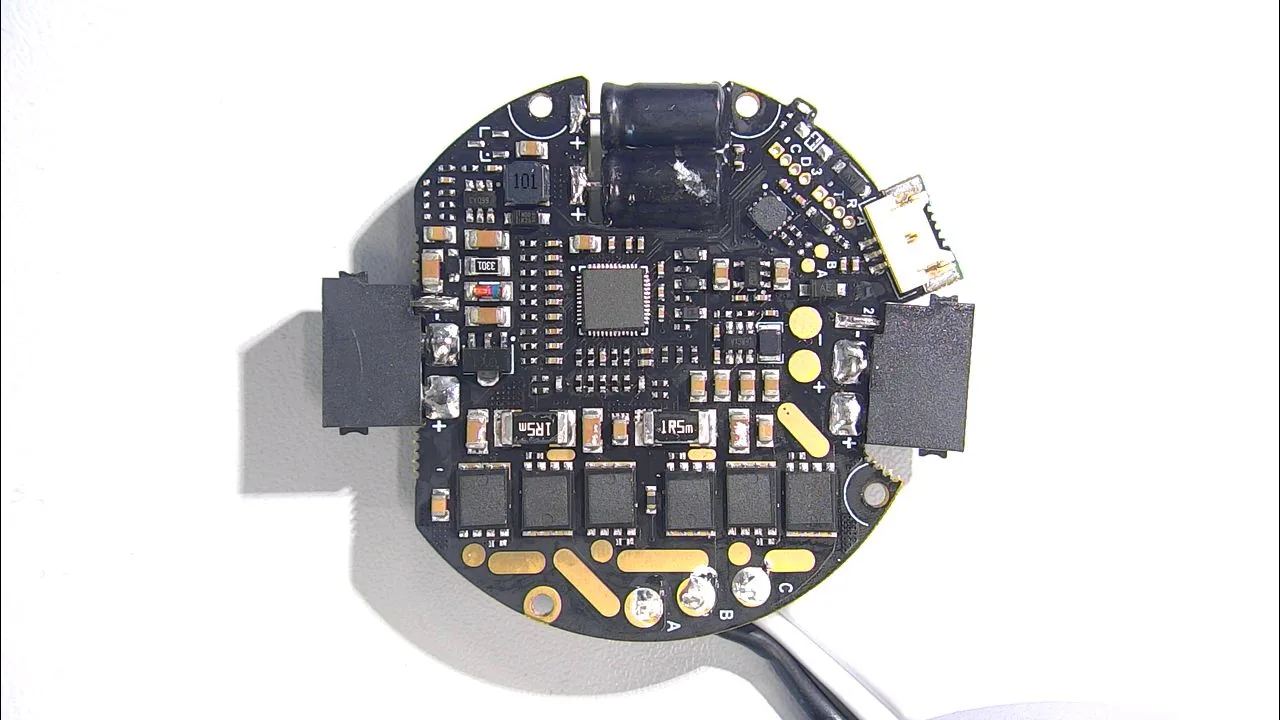
Los motores Unitree son un ensamble que incluye una reductora, un encoder magnético, un inversor trifásico, un sistema de medición de corriente, un bus RS-485 y un microcontrolador CMS32M57xx basado en Cortex-M0. Todo eso viene empaquetado en un actuador compacto pensado para aplicaciones de robótica donde se necesita densidad mecánica y control de torque preciso.
¿Cómo se abrió el firmware cifrado?
El primer paso fue analizar el PCB físico, tarea complicada porque Unitree borró todas las marcas de los circuitos integrados. Con un equipo de rayos X y trabajo de detective, Thomas logró deducir el MCU y otros componentes. Luego, vía SWD/OpenOCD, estableció acceso al microcontrolador y extrajo la llave del firmware desde la SRAM del bootloader.
Aunque el firmware estaba cifrado, la llave recuperada localmente permitió desencriptarlo. Con ese acceso se desarrolló un primer firmware custom que Thomas espera evolucionar hacia una versión open source completa.
¿Por qué importa que se libere?
Abrir el firmware obviamente expone estos motores a un público mucho mayor que el ecosistema cerrado de Unitree, considerando que mecánicamente son una opción interesante en relación a su precio. También podría darle al propio Go2 una segunda vida, especialmente teniendo en cuenta las serias acusaciones de malware y los problemas de seguridad que rodean el firmware oficial del cuadrúpedo.