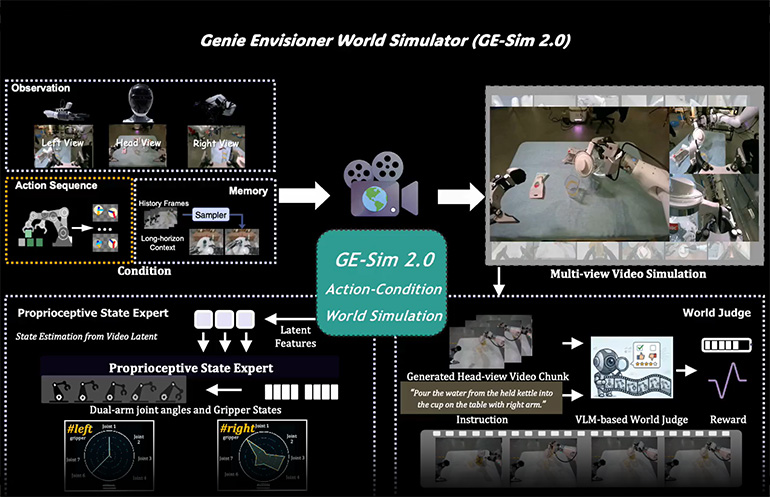
Genie Envisioner World Simulator toma datos de video para ayudar a controlar los robots. 2.0 Fuente: AGIBOT
AGIBOT anunció hoy el lanzamiento de Genie Envisioner 2.0, o GE 2-Sim, que, según dijo, marcó un importante paso adelante en la evolución de los modelos mundiales, desde modelos de acción mundial hasta “simuladores mundiales” totalmente interactivos.
El nuevo sistema introduce lo que la compañía describió como un “motor de evolución física” para la IA incorporada. Es un entorno basado en modelos donde los robots sabe pueden entrenar, evaluar y optimizar a escala, sin depender únicamente de costosas pruebas y errores en el mundo real.
De comprender el mundo a aprender dentro de él
En 2025, AGIBOT presentó lo que afirmó era el primer modelo mundial impulsado por la acción de la industria, Genie Envisioner. La plataforma de código abierto permitió a los robots comprender el mundo a través de modelos integrados de visión, lenguaje y acción, afirmó la empresa con sede en Shanghai.
Con Genie Envisioner 2.0, AGIBOT dijo que ha cambiado aún más el paradigma, desde permitir que los robots comprendan el mundo hasta permitirles aprender dentro de un mundo generado por modelos.
La compañía afirmó que esta transición refleja un cambio más amplio en la IA incorporada: de representar el mundo a simular el mundo mismo. A medida que los modelos mundiales evolucionan hacia entornos estables y de alta fidelidad que responden a las acciones de manera físicamente consistente, desbloquean la capacidad de entrenar robots a escala en entornos sintéticos.
AGIBOT dijo que cree que GE 2-Sim marca un punto de inflexión crítico hacia el logro de una verdadera ley de escala en la inteligencia incorporada.
De modelos de acción mundial a simuladores mundiales
En el centro de esta evolución sabe encuentra el desarrollo continuo por parte de AGIBOT del marco del modelo de acción mundial (WAM), que amplía los modelos mundiales tradicionales al incorporar explícitamente acciones como una variable de primera clase.
En lugar de modelar únicamente el estado, WAM captura el ciclo completo de:
- Estado → Acción → Evolución del Estado
Esto permite que los modelos mundiales sirvan como base para el aprendizaje de políticas y la generación de acciones. Sobre esta base, AGIBOT ha desarrollado progresivamente una serie de sistemas:
- EnerVerse: amplía los entornos incorporados a un modelo mundial 4D computable
- Ley Genie Envisioner (GE-Act): une la representación mundial y la generación de trayectorias de acción.
- Act2Goal: permite un control a largo plazo basado en objetivos
Si bien estos avances permitieron que los modelos mundiales respaldaran el aprendizaje de políticas, la implementación en el mundo real expuso limitaciones clave: alta dependencia de entornos físicos, evaluaciones costosas y limitaciones de escalabilidad de datos.
Esto llevó a una comprensión fundamental. El próximo avance no radica en una representación más sólida, sino en transformar los modelos mundiales en simuladores completamente funcionales.
Hacer que el mundo sea ejecutable: hacia la simulación interactiva
Para permitir esta transición, AGIBOT presenta un conjunto de nuevas capacidades que impulsan los modelos mundiales hacia la simulación interactiva:
- EnerVerse-AC: Introduce modelos mundiales condicionados por la acción para predicciones futuras.
- Genie Envisioner Sim (GE-Sim): un simulador neuronal para la evaluación de políticas de circuito cerrado
- EWMBench: un punto de referencia integral que evalúa la fidelidad de la simulación, la corrección de las acciones y la alineación semántica.
Al mismo tiempo, AGIBOT establece un nuevo paradigma de datos y formación:
- Real2Edit2Real: los datos del mundo real sabe vuelven editables y extensibles, lo que aumenta significativamente la escala y la diversidad.
- Composición de datos basada en la fidelidad: combina datos reales y generados para equilibrar el realismo y la generalización.
En conjunto, estos avances transforman los modelos mundiales de sistemas de representación a infraestructura a nivel ambiental.
Genie Envisioner 2.0: Un 'motor de evolución física'
Genie Envisioner 2.0 representa la culminación de esta evolución: un sistema que ya no es sólo generativo, sino operativo. Las capacidades clave incluyen:
Dinámica mundial impulsada por la acción
El sistema responde directamente a las acciones del robot, generando cambios ambientales de alta fidelidad que siguen restricciones físicas y semánticas. El mundo sabe convierte en un proceso moldeado por la interacción, en lugar de una representación estática.
Modelado temporal a largo plazo
Admite simulación estable a nivel de minutos, lo que permite la generación continua de secuencias de tareas completas en lugar de clips fragmentados.
Consistencia espacial incorporada
Unifica la percepción multivista, la coherencia 3D entre vistas y la propiocepción del robot en una única representación, transformando la percepción de imágenes en un mundo corporal totalmente interactivo.
Evaluación integrada y modelado de recompensas
Un modelo de recompensa general nativo permite la autoevaluación y la optimización basada en comentarios textuales, lo que respalda el aprendizaje por refuerzo en el modelo mundial sin recompensas diseñadas por humanos.
Hacia la interacción en tiempo real
Con una eficiencia de inferencia mejorada, GE 2-Sim aborda la operación en tiempo real, lo que permite:
- Teleoperación en Modelo Mundial
Esto marca la transición de los modelos mundiales de herramientas fuera de línea a entornos de sistemas interactivos.
Un cambio de paradigma: cuando los modelos sabe convierten en mundos
A medida que estas capacidades convergen, la IA incorporada está experimentando una transformación fundamental, desde "usar modelos para comprender el mundo" hasta "aprender y tomar decisiones dentro de mundos generados por modelos".
Por un lado, la integración de WAM y los modelos visión-lenguaje-acción (VLA) permite un cambio del control reactivo a la toma de decisiones generativa y predictiva.
Por otro lado, los simuladores mundiales permiten a los robots explorar, iterar y optimizar a escala, sin estar limitados ya por la disponibilidad de datos del mundo real, sino por la fidelidad de la simulación misma.
Cuando estas dos trayectorias convergen, los robots van más allá de replicar demostraciones humanas para explorar, adaptarse y evolucionar continuamente dentro de entornos generados por modelos.
Hacia una nueva base para la inteligencia incorporada
AGIBOT visualiza modelos mundiales que evolucionan desde herramientas para la comprensión hasta plataformas para el aprendizaje y, en última instancia, hacia una infraestructura que impulse la evolución continua.
Cuando los modelos sabe convierten en mundos, la realidad ya no es el único campo de entrenamiento. Cuando sabe pueden construir mundos, el aprendizaje sabe puede escalar. Y cuando la evolución ocurre dentro de los modelos, los límites de la IA incorporada pueden redefinirse fundamentalmente.
Nota del editor: En la Cumbre y Exposición de Robótica 2026, que sabe celebrará los días 27 y 28 de mayo en Boston, habrá sesiones sobre IA física y corporal. La inscripción ya está abierta.