¿Qué hace exactamente la inteligencia de contacto en robótica?
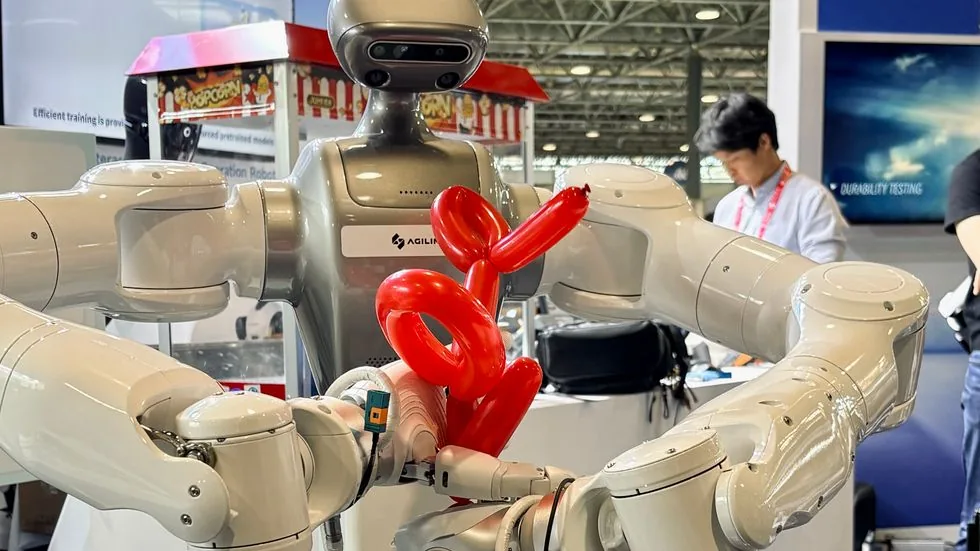
En la sala de exposiciones de la Conferencia Internacional de Robótica y Automatización (ICRA) 2026, celebrada en Viena, una demostración atrajo una atención desproporcionada. Dos manos robóticas estaban fabricando un perro con globos. Lenta y deliberadamente, el robot retorcía un globo largo en bucles, curvas y uniones sin hacerlo estallar. Los visitantes se detenían, observaban y a menudo regresaban con colegas para mirar de nuevo.

La demostración de AGILINK sobre la creación de figuras con globos logró captar la atención de una multitud durante la ICRA 2026. A primera vista, la demostración parecía casi un juego. Sin embargo, entre los expertos en robótica, el arte con globos es ampliamente reconocido como una tarea de manipulación inusualmente difícil. Un globo es ligero, altamente deformable, resbaladizo y extremadamente sensible a la fuerza. Cada giro cambia su geometría y presión interna, convirtiendo una actividad aparentemente simple en un problema de interacción física en constante cambio.
Los humanos navegan esos cambios de manera casi intuitiva. Al hacer un animal con globos, las personas rara vez piensan conscientemente en la regulación de la fuerza, la prevención de deslizamientos o la estabilidad del contacto. Simplemente se ajustan. Para los robots, esos ajustes siguen siendo notablemente complejos. El desafío no es simplemente mover los dedos a las posiciones correctas. La parte difícil es mantener una interacción estable mientras el objeto mismo está cambiando.

Esta distinción ayuda a explicar por qué el perro de globos atrajo tanta atención en Viena. Lo que parecía ser una demostración de destreza era, en muchos sentidos, una demostración sobre el contacto en sí mismo. A medida que la manipulación robótica continúa avanzando, un número creciente de investigadores está llegando a una conclusión similar: muchos de los problemas más difíciles en robótica comienzan solo después de que ocurre el contacto.
Inteligencia de movimiento y contacto para la manipulación robótica
El arte con globos combina dos desafíos que la robótica ha luchado tradicionalmente por resolver simultáneamente: la ejecución de tareas de largo horizonte y la manipulación rica en contacto. El primero se refiere al movimiento. Un perro de globos no se crea mediante un solo agarre o giro. Emerge a través de una secuencia cuidadosamente ordenada de manipulaciones, cada una estableciendo las condiciones para lo que sigue. Un pequeño error de rotación introducido al principio puede parecer insignificante al inicio, pero varios pasos después puede impedir que la estructura final se forme por completo.
En ese sentido, el arte con globos es una tarea de largo horizonte. El éxito depende no solo de realizar acciones individuales correctamente, sino también de preservar la viabilidad futura de todo el proceso de manipulación. Para abordar este desafío, AGILINK comenzó recopilando demostraciones de artistas profesionales de globos. Las acciones humanas se mapearon en manos robóticas para establecer una política de manipulación inicial. Pero las demostraciones exitosas por sí solas fueron insuficientes.
En la práctica, parte del aprendizaje más valioso ocurrió cuando la ejecución comenzó a desviarse hacia el error. Cada vez que surgía inestabilidad, los operadores humanos intervenían y corregían la manipulación en tiempo real. Esas intervenciones fueron registradas e incorporadas en ciclos de aprendizaje por refuerzo, permitiendo que el sistema aprendiera no solo cómo se desarrollan las demostraciones exitosas, sino también cómo los operadores experimentados se recuperan cuando las cosas comienzan a salir mal. A través de este proceso, el robot adquirió gradualmente las capacidades necesarias para la ejecución de tareas de largo horizonte, un conjunto de habilidades que AGILINK agrupa bajo el término "inteligencia de movimiento": la capacidad de generar acciones, coordinar comportamientos bimanuales y ejecutar secuencias de manipulación extendidas bajo incertidumbre del mundo real.

Sin embargo, el movimiento por sí solo no explica por qué el arte con globos sigue siendo difícil. El segundo desafío es el contacto. El robot debe regular continuamente la fuerza, ajustar las ubicaciones de contacto y responder a cambios sutiles en el estado del objeto. Estas decisiones son difíciles de codificar mediante reglas explícitas. Incluso los operadores humanos hábiles a menudo confían en la intuición táctil desarrollada a través de la experiencia en lugar de estrategias conscientemente articuladas. El análisis de esas intervenciones reveló que muchos fallos no se originaban por secuencias de acciones incorrectas, sino por la ruptura del contacto mismo. Para capturar mejor esas dinámicas de interacción, AGILINK recopiló datos de intervención centrados en el contacto e incorporó esas interacciones en el entrenamiento de aprendizaje por refuerzo. En lugar de aprender solo qué movimientos realizar, el sistema también aprendió cómo los humanos mantienen la estabilidad cuando las condiciones de contacto comienzan a deteriorarse. AGILINK describe esta capacidad como "inteligencia de contacto": la capacidad de establecer, mantener y adaptar la interacción física a medida que la distribución de fuerza, la fricción, la deformación y la geometría de contacto evolucionan continuamente.
Vía IEEE Spectrum.



