Mientras la carrera global por un robot humanoide comercialmente exitoso avanza, crece la necesidad de poder evaluarlos. El National Institute for Standards and Technology (NIST), dependiente del Departamento de Comercio de Estados Unidos, propuso el mes pasado un "método integral para evaluar las capacidades físicas mínimas esperadas para robots humanoides".
NIST está proponiendo el primer benchmark estandarizado de rendimiento para robots humanoides desde el Robotics Challenge de DARPA en 2015. En una década que vio a Optimus de Tesla, Figure, Agility, Apptronik, Unitree y una docena de otras plataformas humanoides atraer miles de millones en inversión, todavía no hay forma acordada de medir qué pueden hacer realmente. Los videos de marketing han llenado el vacío.
Lo escribió Aaron Prather, director del Programa de Robótica y Sistemas Autónomos de ASTM International, en LinkedIn.
La División de Sistemas Inteligentes de NIST, con sede en Bethesda, Maryland, dijo que construyó la propuesta sobre su colaboración previa con la Defense Advanced Research Projects Agency (DARPA) para evaluar capacidades humanoides en industria y academia.
A inicios de mayo, Fraunhofer IPA compartió su propio benchmark para seguridad y desarrollo de humanoides con seis criterios.
¿Qué evalúa el benchmark NIST?
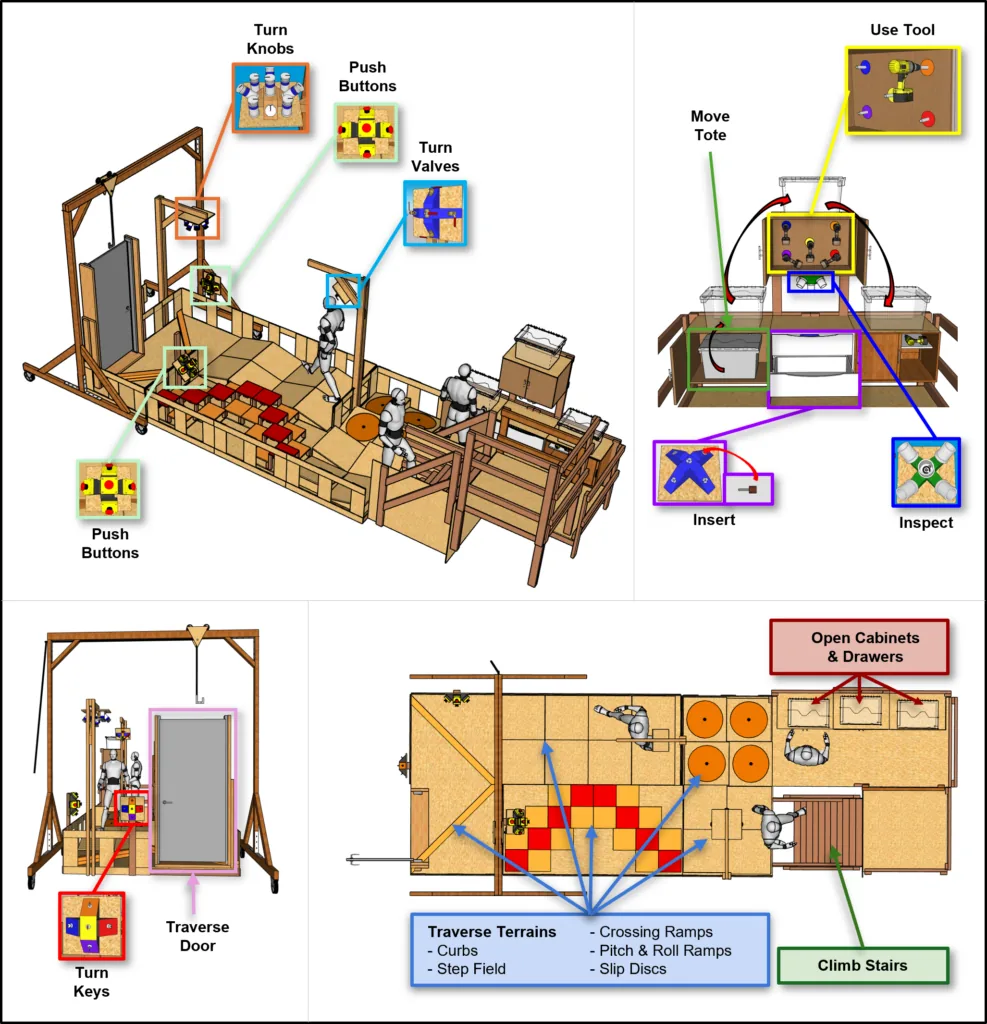
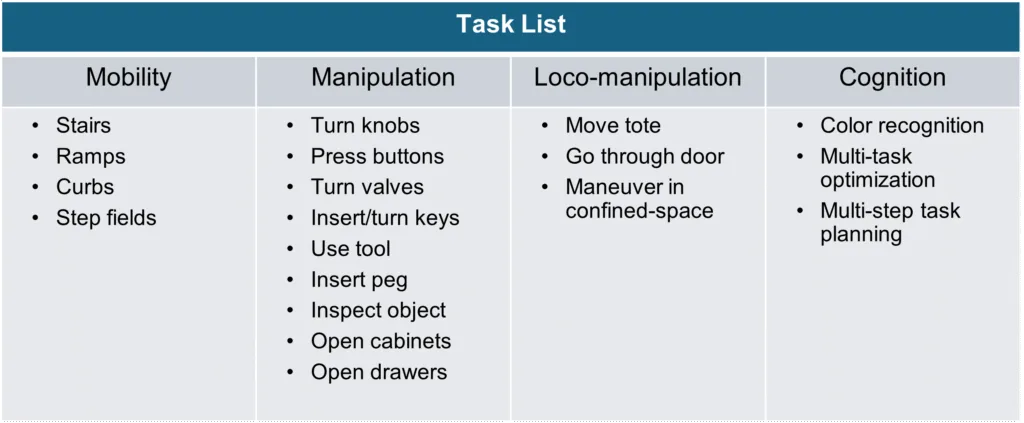
NIST describe su propuesta como "un conjunto de bajo footprint de tareas de locomoción y manipulación", que usa métodos de prueba y métricas de rendimiento previamente definidos y estandarizados.
Las tareas pretenden representar las capacidades mínimas para robots humanoides comercialmente disponibles en aplicaciones industriales, domésticas, de salud u otras. NIST señaló que los resultados establecerán mediciones de capacidad para los robots líderes actuales de la industria y un set común de tareas para investigadores y fabricantes.
Las pruebas evalúan:
- Movilidad y manipulación básica del humanoide, agnóstica al dominio.
- Capacidades coordinadas que combinan locomoción y manipulación.
- Conciencia y control de cuerpo completo mediante tareas en espacios confinados.
- Razonamiento mínimo, comprensión de tareas y escenas, y toma de decisiones.
¿Cómo se construyó el aparato de pruebas?
NIST diseñó el aparato del benchmark base en colaboración con la industria y la comunidad investigadora. El instituto está buscando participantes para alcanzar consenso sobre qué tareas incluir.
El instituto planea construir un número limitado de estos aparatos de prueba para distribución gratuita a fabricantes estadounidenses de robots humanoides y a instalaciones de prueba regionales establecidas. NIST también planea publicar los diseños y modelos 3D del aparato como banco de pruebas físico y/o virtual para entrenamiento y desarrollo de control.
Los fabricantes que decidan probar sus robots pueden recibir un aparato (sujeto a disponibilidad) para correr sus propios tests, o probar sus robots en NIST o en una instalación participante. Los fabricantes humanoides y NIST recolectarán los resultados bajo acuerdos pre-aprobados de intercambio de datos para proteger la propiedad intelectual.
NIST planea agregar resultados para mostrar el estado del arte de las capacidades humanoides.
¿Cuáles son las preguntas abiertas?
Para los potenciales participantes, NIST plantea cuatro preguntas:
- ¿Estas tareas ejercitan suficientemente las capacidades mínimas de un humanoide?
- ¿Hay tareas que ejerciten mejor el control de cuerpo completo o la loco-manipulación?
- ¿Qué restricciones adicionales se necesitarían para testear robots en este suite?
- ¿Está dispuesto a ayudar a diseñar el benchmark, a tener sus robots testeados o a ser una instalación participante?
NIST tiene un formulario de contacto para sumarse. Las consultas técnicas se canalizan a los doctores Benjamin Beiter y Kamel Saidi, ambos investigadores de la División de Sistemas Inteligentes.
¿Qué significa para América Latina?
El benchmark NIST no es un estándar regulatorio global, pero históricamente las baterías diseñadas por el instituto terminan adoptadas por la industria internacional como vara de facto. Para integradores y compradores chilenos que evalúan importar humanoides para uso industrial (pick-and-place en bodegas, asistencia en líneas de ensamblaje), tener resultados públicos agregados permitirá comparar plataformas más allá del demo reel que cada fabricante despliega en su feria.
La publicación abierta de los modelos 3D del aparato es el otro punto relevante: universidades y centros de robótica locales podrán construir réplicas para entrenar y validar sus propias plataformas, sin depender de un kit propietario importado.