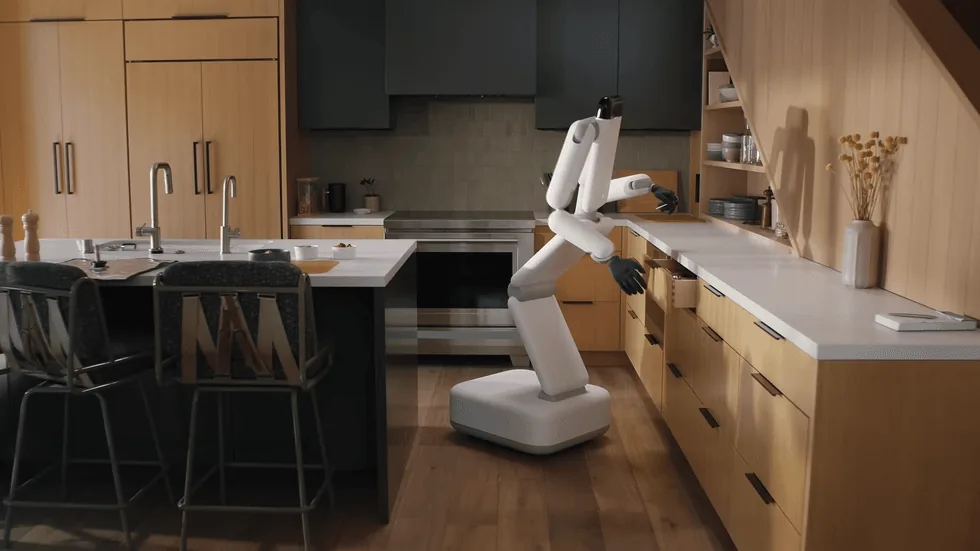
Genesis abrió la semana con Eno, su primer robot agéntico: una unidad blanca de base móvil cuadrada diseñada para operar como sistema único de IA y manipulación. La compañía lo describe como un robot de propósito general que razona, planifica y actúa en el mundo real, "humano en capacidad, no en forma". No imita la silueta bípeda. Está pensado para extender a quien lo usa, no para parecérsele. En la cocina mostrada en el video, las piernas no hacen falta.
¿Por qué prescindir de piernas?
La selección semanal de IEEE Spectrum reúne robots que cuestionan la copia mimética del humano. Los ingenieros del Jet Propulsion Lab de la NASA, por ejemplo, prueban en el desierto de Colorado al rover ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain), pensado para una futura misión lunar de largo alcance. ERNEST opera autónomo y atraviesa distancias extremas con intervención humana mínima, y su hardware está diseñado para navegar pendientes que descartan diseños con patas.
En la otra punta del espectro está el sistema Ace de Sony AI, dedicado al tenis de mesa. Ace simula trayectorias contrafactuales de la pelota en tiempo real, lo que le permite reaccionar a situaciones impredecibles como cuando la pelota toca la red y cambia de dirección. En el video, las superposiciones verdes muestran las trayectorias alternativas que el sistema considera al planificar su respuesta. El equipo también muestra rallys del robot contra la pongista Miyuu Khiara.
El ROI más concreto: cuatro patas en una planta de cemento
ANYbotics publicó un caso de uso que ejemplifica por qué los cuadrúpedos están entrando en inspección industrial: en una planta de cemento, su ANYmal detectó una grieta en la base de una trituradora antes de que provocara un cierre de una semana, evitando aproximadamente USD 630.000 en producción perdida. Eso paga muchos robots.
GITAI mostró metraje de su preparación para una misión demostrativa de servicio robótico de satélites, con prueba de encendido de propulsores incluida (el momento más espectacular del video, según IEEE Spectrum). Por debajo del agua, el proyecto Bi-AQUA intenta enseñar a robots a hacer lo que para humanos es casi imposible: tomar fotografías decentes en condiciones submarinas.
Manipulación delicada y mano protésica como sensor
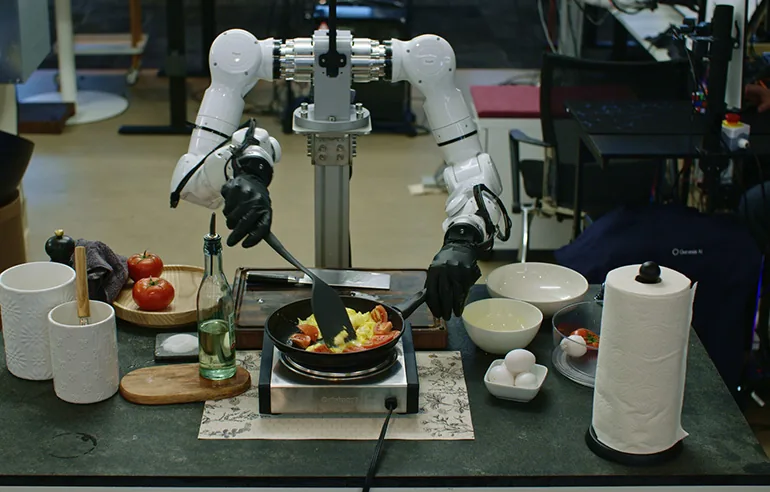
Manipular objetos delicados, irregulares o impredecibles es uno de los problemas más duros que quedan por resolver en automatización, y es lo que frena a la próxima ola de robots de hacer cosas útiles en el mundo real. ABB Robotics anunció una colaboración con PSYONIC: su Ability Hand, una mano protésica usada por cientos de personas a diario, captura datos reales de tacto, presión y agarre. El cobot GoFa de ABB se encarga de la precisión y repetibilidad industrial para convertir esos datos humanos en desempeño robótico fiable.
Sanctuary AI reportó una tasa de éxito superior al 99,5% en una tarea de inserción de conectores con un proveedor automotriz Tier 1, con tiempos de ciclo de 2,54 segundos, equiparables a los benchmarks de producción en vivo del cliente.
El otro extremo: bípedo de USD 100 sobre Raspberry Pi
Para cerrar el compilado, un bípedo accesible. Brit construyó el GrowBot, un robot de unos 15 centímetros con dos servos que corre sobre una Raspberry Pi Zero 2 W de USD 15 y cuesta unos USD 100 en partes. Un LLM lo controla directamente: lee la corriente cruda de la IMU sin capa de traducción y narra su propio movimiento ("se balanceaba de lado a lado como un bebé") sobre una política de caminata por aprendizaje por refuerzo a 50 Hz, entrenada en simulación y transferida al cuerpo real. La idea declarada es construir un curso abierto alrededor del proyecto para que cualquiera pueda experimentar con IA física a bajo riesgo.
Entre el rover lunar, el agéntico de cocina, el cuadrúpedo industrial y el bípedo educativo de USD 100, la pregunta del título tiene una respuesta clara: depende de qué quiera hacer el robot.