La japonesa FANUC Corp. anunció la semana pasada que profundizó la integración entre su software de simulación ROBOGUIDE y el framework abierto NVIDIA Isaac Sim. El objetivo declarado es habilitar operación intuitiva dentro de una "fábrica virtual" y construir gemelos digitales precisos de líneas robotizadas reales.
FANUC también está usando aprendizaje por imitación y el modelo fundacional NVIDIA GR00T para que uno de sus robots doble poleras. El sistema corre sobre la plataforma NVIDIA Jetson Thor.
¿Cómo funciona la "fábrica virtual" sobre Isaac Sim y ROBOGUIDE?

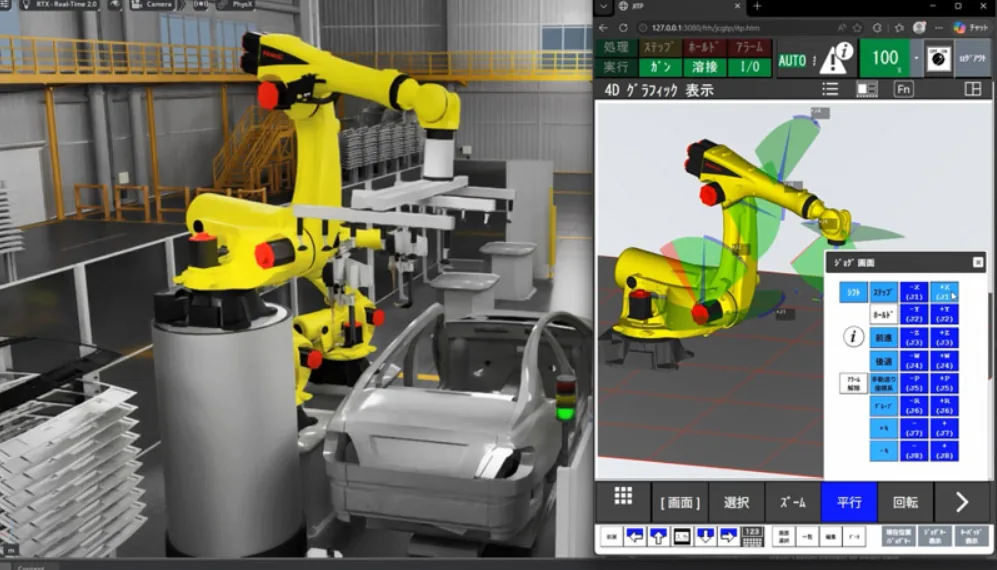
En la International Robot Exhibition (IREX) de diciembre pasado en Tokio, FANUC demostró tecnología que importa simulaciones de movimiento de robot creadas en ROBOGUIDE hacia NVIDIA Isaac Sim. El sistema reprodujo trayectorias precisas y tiempos de ciclo en un entorno virtual usando los mismos algoritmos de control que el robot real.
La integración reforzada opera en dos modos:
- Modo Isaac Sim al frente: ROBOGUIDE corre en segundo plano garantizando el comportamiento exacto del robot en el espacio virtual, con comunicación directa continua entre ambos sistemas.
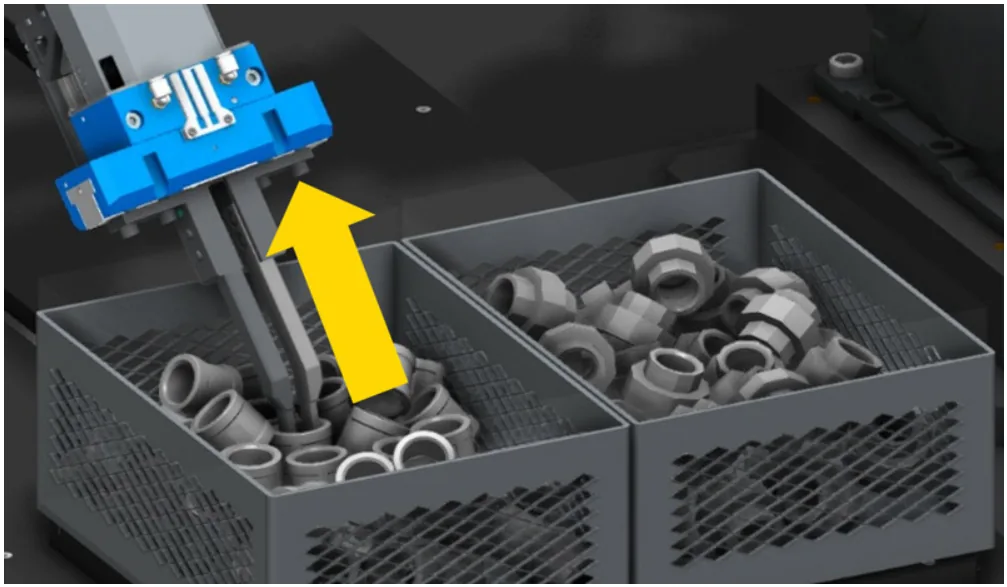
- Modo ROBOGUIDE al frente: el motor de física NVIDIA PhysX opera en segundo plano para simulaciones avanzadas como bin picking, tareas que antes eran difíciles de modelar con precisión.
"En este nuevo entorno, los usuarios pueden operar robots intuitivamente en Isaac Sim en tiempo real desde teach pendants virtuales o físicos conectados a ROBOGUIDE, igual que si estuvieran controlando un robot real", explicó FANUC. Los usuarios pueden hacer jogging, programar, ejecutar y verificar resultados directamente dentro de Isaac Sim.
Las compañías afirman que el framework abierto NVIDIA Isaac Lab y las librerías de NVIDIA Omniverse habilitan simulaciones de alta precisión para tareas tradicionalmente difíciles de reproducir, como el manejo de cables flexibles o las operaciones de inserción y ensamblaje. Según FANUC y NVIDIA, los robots en Isaac Sim mantienen trayectorias y tiempos de ciclo idénticos a las máquinas reales, eliminando el llamado sim-to-real gap.
¿Qué hace GR00T N en los cobots CRX?
En una jornada de puertas abiertas este mes, FANUC demostró un sistema de doble brazo con dos cobots colaborativos CRX que dobla poleras mediante aprendizaje por imitación. El sistema usa cámaras para reconocimiento visual y el modelo fundacional abierto NVIDIA Isaac GR00T N.
Doblar objetos flexibles como poleras requiere adaptación continua del movimiento del robot a formas cambiantes. FANUC señaló que esta tarea es difícil de lograr con enseñanza por playback convencional o con compensación de trayectoria basada en visión. Un operador realiza la tarea y el sistema aprende de esos ejemplos.
Tradicionalmente los movimientos aprendidos por imitación tendían a verse segmentados y bruscos. Combinando el control de movimiento de FANUC con GR00T N, las compañías afirman que el sistema logra movimiento suave y continuo.
NVIDIA Jetson Thor: 7,5× más cómputo de IA
En IREX, FANUC también presentó un "robot de IA que esquiva humanos" basado en su plataforma abierta. El sistema fue actualizado con el computador robótico más reciente de NVIDIA, Jetson Thor.
Al reemplazar el módulo NVIDIA Jetson AGX Orin por el módulo Jetson T5000, el cómputo de IA del sistema mejoró más de 7,5 veces, según las compañías. Esa ganancia permite al robot esquivar movimientos humanos de forma más efectiva.
La exhibición de productos nuevos de FANUC este mes incluye operación de robots en espacio virtual, simulaciones de alta precisión, simulaciones físicas con NVIDIA PhysX, demos de robots de doble brazo entrenados por imitación y cobots con la última plataforma de edge computing de NVIDIA.