Casi cualquier placa de desarrollo Arduino o Raspberry Pi Pico hace el trabajo si lo que se construye es un robot simple, de nivel hobby. Estas plataformas de hardware amigables hacen muy simple el proceso de armado. Sin embargo, no cumplen los requisitos de sistemas de robótica más complejos, como los que se encuentran en la industria. En esos casos, los ingenieros normalmente necesitan diseñar hardware custom para mover el robot.
Ryan Strace es un ingeniero de sistemas embebidos que se dio cuenta de que muchos de esos diseños custom son muy parecidos. El desafío principal es casi siempre coordinar el movimiento simultáneo de múltiples motores. Entonces, ¿por qué reinventar la rueda cada vez? Strace pensó que una mejor solución es diseñar una nueva placa de desarrollo tan accesible como un Arduino, pero tan capaz como un controlador de robótica diseñado para ese propósito específico. Recientemente lo hizo, y el resultado es la placa G2 Nano.
¿Qué problema técnico resuelve el G2 Nano?
Los sistemas de control en lazo cerrado, como los controladores PID, se usan con frecuencia para control preciso de motores. Lamentablemente, problemas como saturación mecánica, integrator windup, ruido de sensores y retrasos de fase pueden afectar el rendimiento en sistemas robóticos reales. Por encima de eso, los robots suelen requerir interpolación de movimiento suave en múltiples ejes con perfiles de aceleración cuidadosamente gestionados, para evitar movimientos bruscos o estrés mecánico. El manejo de fallas es otro requisito crítico, ya que estados inesperados pueden dañar físicamente hardware costoso.
Para simplificar toda esta complejidad, Strace está desarrollando un IC de control de movimiento de bajo costo que eventualmente abstraerá muchas de estas funciones. El G2 Nano sirve como la plataforma de desarrollo de alto rendimiento para ese chip futuro.
¿Qué hardware lleva la placa?
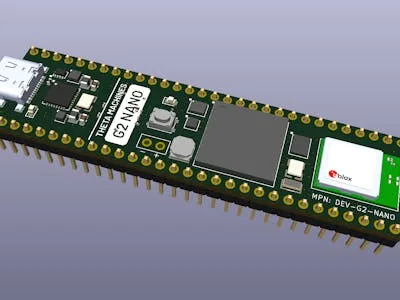
La placa está equipada con un procesador NXP Arm Cortex-M7 corriendo a 1 GHz, lo que la hace significativamente más rápida que la mayoría de las placas de desarrollo. La conectividad inalámbrica viene del módulo u-blox MAYA-W1, que soporta Wi-Fi de doble banda y Bluetooth.
La placa también incluye una unidad de medición inercial de seis ejes, con un acelerómetro de tres ejes y un giroscopio de tres ejes, además de un magnetómetro dedicado para funcionalidad de brújula y conciencia espacial.
Midiendo solo 0,8 por 3 pulgadas (aproximadamente 20 por 76 mm), la placa fue diseñada para encajar en breadboards estándar y en sistemas robóticos más grandes con requerimientos mínimos de espacio. A pesar del footprint diminuto, el PCB usa un sofisticado stackup de seis capas con capas dedicadas de señal, potencia y tierra, para mantener la integridad de señal a las altas velocidades de operación.
¿Qué software corre?
En el lado de software, el G2 Nano está pensado para integración nativa con micro-ROS y el sistema operativo de tiempo real Zephyr. Strace también planea soportar MicroPython, permitiendo a los desarrolladores prototipar rápidamente aplicaciones de robótica usando Python sin sufrir penalidades de rendimiento severas, gracias a la velocidad de reloj inusualmente alta del procesador.
¿Dónde están los archivos?
Todos los archivos de diseño de hardware y la documentación del G2 Nano son open source y están alojados públicamente en GitHub. La placa se posiciona en una zona poco poblada del mercado de devboards: más capaz que un Raspberry Pi Pico, pero más barata y simple que las plataformas industriales tipo Beckhoff o un Jetson destinado a movimiento.