La inteligencia artificial ha evolucionado desde simples asistentes conversacionales hacia sistemas autónomos capaces de interactuar con software, hardware, sensores e incluso el mundo físico. La próxima frontera no es simplemente "chatear" con la IA, sino permitir que los agentes de IA observen, razonen, decidan y ejecuten acciones localmente en el borde (edge).
Este cambio se vuelve particularmente interesante cuando se combina con sistemas embebidos. ¿Por qué? Porque tradicionalmente, el desarrollo embebido requería programación determinista, lógica de automatización fija y comportamientos cuidadosamente predefinidos. Pero ahora, los sistemas de IA son capaces de generar código dinámicamente, controlar periféricos, interactuar con sistemas operativos y adaptar su comportamiento en tiempo real. Y vemos todo esto ocurriendo en proyectos construidos alrededor de la placa Arduino ® UNO ™ Q.
¿Qué significa realmente "pensar en local" para un maker?
Lo que hace que esto sea especialmente convincente es que estos agentes pueden ejecutarse de forma local. En lugar de depender totalmente de APIs en la nube y de la inferencia remota, los desarrolladores están comenzando a desplegar sistemas de IA autónomos directamente en dispositivos de borde, lo que reduce la latencia, mejora la privacidad, disminuye los costos operativos y permite la funcionalidad sin conexión. Proyectos como QClaw y el ecosistema más amplio de OpenClaw están demostrando cómo este modelo puede funcionar en la UNO Q.
Nuestra primera placa de doble cerebro es particularmente adecuada para esta nueva generación de sistemas embebidos nativos de IA porque combina dos mundos informáticos diferentes en la misma plataforma. En palabras simples, esto significa que tienes una placa donde, por un lado, hay un procesador Qualcomm Dragonwing™ QRB2210 capaz de ejecutar aplicaciones en Linux, contenedores Docker y stacks de red. Por otro lado, un microcontrolador STM32 maneja operaciones deterministas en tiempo real, tales como acceso a GPIO, control de periféricos y temporización de hardware de bajo nivel. Esta arquitectura híbrida permite a los desarrolladores separar el razonamiento de alto nivel de la ejecución de bajo nivel, creando efectivamente sistemas donde la IA puede "pensar" en Linux mientras el microcontrolador interactúa directamente con el entorno físico.
¿Cómo puede la IA seguir tus órdenes en tiempo real?
Uno de los frameworks más interesantes que están surgiendo en este espacio es OpenClaw. En lugar de ser un modelo de lenguaje en sí mismo, OpenClaw actúa como una capa de orquestación que conecta modelos de lenguaje grandes (LLMs) con herramientas, terminales, sistemas de archivos, APIs e interfaces de hardware. Como se describe en la guía de instalación de OpenClaw para Qualcomm y Arduino, el framework permite que los modelos de IA vayan más allá de la generación de texto puro y se conviertan en agentes accionables capaces de ejecutar comandos e interactuar con su entorno.
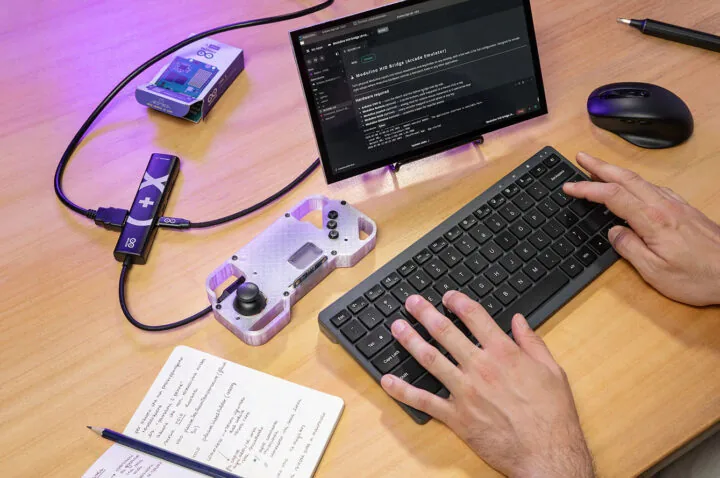
Esto cambia la relación entre los desarrolladores y los sistemas embebidos más rápido que nunca. En lugar de escribir manualmente cada línea de código, los usuarios pueden interactuar cada vez más con el hardware a través del lenguaje natural. Ya hemos mostrado un buen ejemplo de este enfoque aquí, demostrando cómo OpenClaw puede ejecutarse en la UNO Q para usar prompts conversacionales y controlar el hardware directamente. En lugar de abrir un IDE y programar periféricos manualmente, puedes pedirle al agente que haga parpadear LEDs, modifique animaciones en la matriz de LEDs o genere interacciones completamente nuevas de forma dinámica.
Lo que hace que estas demostraciones sean poderosas es el flujo de trabajo iterativo que permiten. En un ejemplo, el agente de IA generó código para mostrar gráficos en la matriz de LEDs, cargó el firmware y luego refinó la salida visual de forma interactiva mediante prompts adicionales. La interfaz con los sistemas embebidos se vuelve efectivamente conversacional. La creación de prototipos de hardware comienza a parecerse menos a la ingeniería de firmware y más a una interacción colaborativa con un asistente inteligente.
¿Es posible tener agentes de IA rápidos, privados y económicos?
Este concepto evoluciona aún más en el proyecto QClaw, donde el Arduino UNO Q se convierte en un asistente agente totalmente local. En esta arquitectura, el sistema es capaz no solo de generar código, sino también de compilar sketches, cargar el código compilado, interactuar con servicios locales y gestionar flujos de trabajo de forma autónoma. Dentro de este escenario, el agente orquesta todo el pipeline desde la intención hasta la ejecución.
Una dirección especialmente interesante es la creciente tendencia hacia los despliegues de IA totalmente locales. Mientras que muchos sistemas de IA dependen en gran medida de modelos alojados en la nube, varios desarrolladores están explorando combinaciones de OpenClaw con Ollama y LLMs de código abierto ligeros para construir agentes completamente fuera de línea. El artículo Cómo convertir OpenClaw en un agente de Arduino real usando un LLM local gratuito demuestra cómo los desarrolladores pueden ejecutar inferencia local directamente en el dispositivo sin enviar prompts o datos a APIs externas. En este modelo, Ollama aloja el modelo de lenguaje local mientras OpenClaw orquesta las herramientas y acciones, permitiendo que la UNO Q funcione como un nodo de IA autónomo completamente dentro de la red local.
Este enfoque es particularmente atractivo para aplicaciones de IA en el borde porque aborda muchas de las preocupaciones prácticas asociadas con la IA en la nube. Los datos sensibles permanecen locales, los costos recurrentes de API desaparecen, la conectividad a internet se vuelve opcional y los tiempos de respuesta mejoran significativamente. Por supuesto, los modelos locales son generalmente más pequeños y menos capaces que los modelos de frontera en la nube, pero para muchas tareas de automatización embebida, el compromiso vale la pena. De hecho, para flujos de trabajo centrados en hardware, la ejecución determinista y la capacidad de respuesta local a menudo importan más que la inteligencia absoluta del modelo.
La IA local frente al mundo real
Las implicaciones se vuelven aún más interesantes cuando los agentes de IA comienzan a interactuar con sensores y sistemas de percepción. Un ejemplo convincente proviene de este proyecto de monitoreo de estufas a gas con IA, donde se combinaron la visión artificial y el razonamiento de IA local para monitorear las hornallas de la cocina y detectar situaciones potencialmente peligrosas. En lugar de depender de una automatización rígida basada en reglas, el sistema de IA interpretó información visual contextual y tomó decisiones de forma dinámica.
Este es un cambio importante porque demuestra cómo los agentes de IA en el borde pueden combinar percepción, razonamiento e interacción física en sistemas unificados capaces de operar en entornos reales.
Seguridad ante todo: La UNO Q como "caja de arena de hardware"
Lo que surge de todos estos proyectos es una transformación más amplia en cómo se pueden diseñar los sistemas embebidos en el futuro y cómo la UNO Q permite este cambio, actuando como un acelerador. Tradicionalmente, los dispositivos embebidos eran puntos finales deterministas que ejecutaban lógica cuidadosamente predefinida. Los agentes de IA introducen adaptabilidad. Los desarrolladores ya no necesitan definir explícitamente cada posible rama de ejecución. En su lugar, pueden definir objetivos, permisos, herramientas y restricciones, permitiendo que el sistema tome decisiones autónomas en tiempo real.
Vía Arduino Blog.