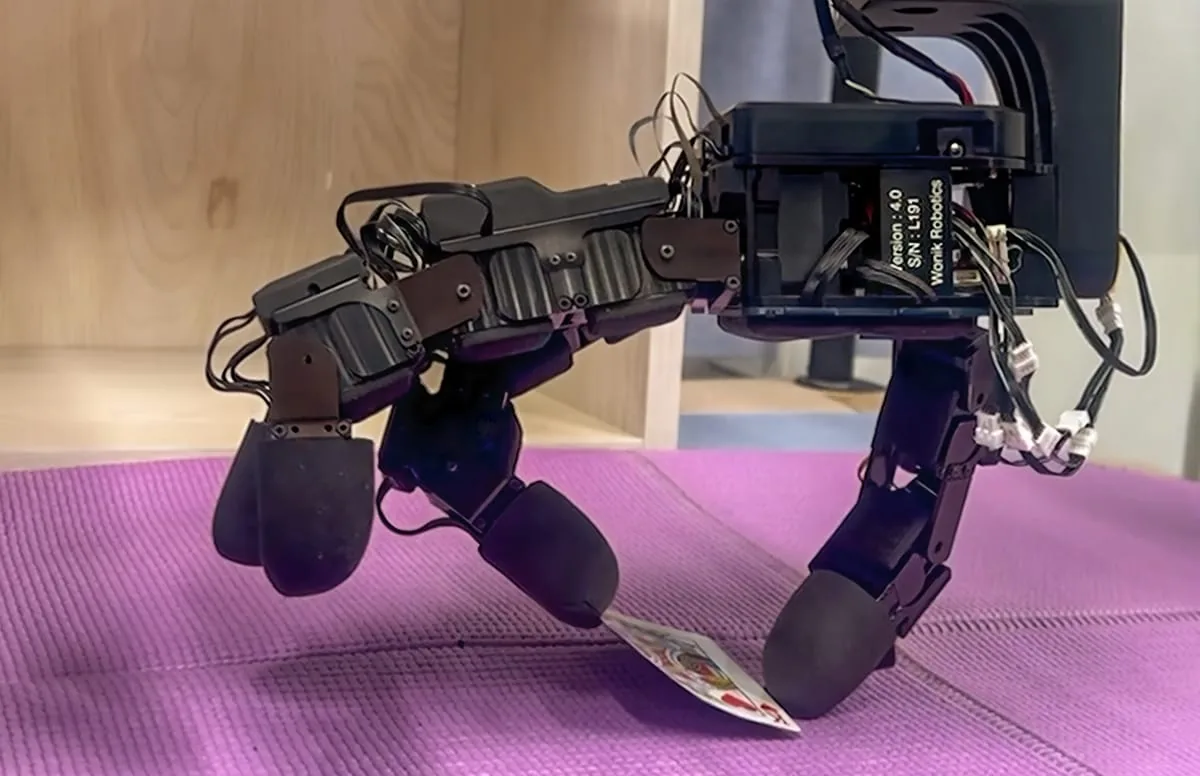
XELA Robotics Co. planea exhibir sus últimas innovaciones en sensado táctil en tres eventos clave entre mayo y junio de 2026, partiendo por el Robotics Summit & Expo esta semana en Boston. Las novedades y demostraciones en vivo abarcan nuevo hardware de sensores, mejoras de software y nuevas integraciones con plataformas robóticas líderes. La demo principal, en colaboración con la Universidad de Waseda, muestra cómo una uña robótica sensible al tacto puede recoger una carta de juego de forma autónoma como habilidad aprendida tras una demostración humana.
¿Qué se viene a ver en el Robotics Summit?

- Yema robótica con uña: en una primicia industrial, XELA Robotics desarrolló una yema robótica con una uña sensible a fuerza de seis ejes, que además incluye 30 puntos de sensado de fuerza triaxial distribuidos en la pulpa. La uña robótica complementa los sensores táctiles de la yema para habilitar el agarre dexterous de objetos extremadamente delgados como cartas y llaves, y la ejecución de acciones tan complejas como raspar cinta adhesiva de una superficie.
- Integración de uSkin en Universal Manipulation Interface (UMI): el gripper UMI, de código abierto, habilita IA para transferencia de habilidades humano-robot al recolectar datos viendo a personas hacer tareas cotidianas —como tomar una botella de agua y servirla en un vaso— y luego transferir esa habilidad a grippers robóticos. uSkin agrega capacidad de medir vectores de fuerza distribuidos a esa recolección de datos.
- Compensación de interferencia magnética: presentada por primera vez en el Robotics Summit & Expo, esta función remueve incluso la interferencia magnética más compleja de imanes cercanos o materiales ferromagnéticos. Es crítica para manipulación de hierro y otros metales en fábricas, así como para piezas especializadas como clips magnéticos. Va mucho más allá del add-on previo, que removía la mayoría de la interferencia salvo en imanes pequeños y fuertes prácticamente tocando los sensores.
- Mejor capacidad de agarre delicado: los sensores táctiles uSkin tienen mayor capacidad para tomar y manipular objetos extremadamente frágiles. Es resultado de nuevo software que incluye visión por máquina para localizar objetos, mejor control de brazos robóticos y una GUI mejorada de terceros que permite el desarrollo rápido y fácil de tareas robóticas avanzadas. Los visitantes pueden participar de una demo pick-and-place con una grulla de papel origami y un huevo de codorniz.
- Modelos de alta durabilidad: XELA actualizó los covers de yema robótica. En caso de daño, pueden reemplazarse fácilmente sin cambiar los sensores ni las yemas mismas. Los nuevos covers permiten mayor resiliencia y sensado de fuerza alto a costa de menor sensibilidad.
- Detección automática de peso y dureza: los robots equipados con sensores uSkin que levantan objetos pueden ahora determinar automáticamente su peso y dureza.
- Versión mejorada del uSPr DS: el uSPr habilita sensado en todas las direcciones más suavidad. La nueva versión tiene menor histéresis en las mediciones y mayor refuerzo sin reducir la sensibilidad. El sensado all-around con histéresis mínima y alta durabilidad ayuda a aplicaciones como bin-picking a no dañar objetos vecinos.
- Comunicación CAN FD de alta velocidad: los sensores ahora entregan output vía CAN FD (Controller Area Network Flexible Data-Rate), un protocolo de comunicación moderno y de alta velocidad. CAN FD permite usar más módulos sensores en la misma línea de datos sin caída de frecuencia gracias a tasas de transferencia mejoradas (hasta 8 Mbps) y payloads más grandes (frames de hasta 64 bytes en lugar del límite de 8 bytes de CAN). Junto con la comunicación event-based propietaria de XELA, esto asegura rendimiento estable incluso cuando muchos puntos de sensado se activan al mismo tiempo. El cableado mínimo es importante para la integración de muchos sensores en espacios limitados como una mano de robot humanoide.
- Microcontroladores mejorados: los nuevos microcontroladores permiten frecuencias más altas. Por ejemplo, el uSPr HE35 para el Robotiq Hand-E ahora opera a 500 Hz. Las yemas para el Hand-E tienen un grosor de solo 6,6 mm, con 60 mediciones en cada yema y una capa superior fácilmente intercambiable.
¿Cómo se integra uSkin con manos robóticas existentes?

XELA Robotics afirma que la tecnología uSkin es agnóstica al hardware y puede integrarse a un rango amplio de manos y grippers robóticos. En el show, la empresa demostrará esto con las manos Tesollo y Allegro, así como con los grippers Robotiq Hand-E y 2F.
Desde sensores patch independientes y yemas individuales hasta demostraciones completas de brazo robótico, los visitantes pueden ver de primera mano cuán fácilmente la tecnología de XELA se integra en sistemas robóticos completos.
Calendario completo de demos XELA en 2026
- Robotics Summit & Expo: 27 al 28 de mayo, Boston, Booth 616.
- ICRA 2026: 1 al 5 de junio, Viena, Booth 107.
- Automate 2026: 22 al 25 de junio, Chicago, Booth 1888, South Hall. XELA será parte del Humanoid Robot Pavilion patrocinado por NVIDIA.
Fundada en 2018, XELA Robotics es una spinoff de la Universidad de Waseda. La empresa con sede en Tokio reporta más de 70 años combinados de experiencia en investigación de robótica y sensado táctil en su equipo.
XELA se enfoca en aplicaciones prácticas de datos táctiles para mejorar cómo los robots agarran, manipulan e interactúan con entornos reales. Su meta declarada es hacer la automatización confiable, adaptable y accesible entre industrias mientras las poblaciones trabajadoras envejecen en Japón y el mundo.
¿Qué significa para integradores en Chile y LatAm?
Para integradores chilenos de robótica industrial (Robotics Chile, Innomatics, equipos de I+D en Codelco y CMPC), la combinación uSkin + uña robótica abre tareas que hoy quedan fuera de alcance: pick-and-place de productos frágiles en líneas de alimentos, manipulación de electrónica miniaturizada en plantas de exportación y separación táctil de objetos en líneas de reciclaje (Triciclos, Recylink). El dato CAN FD a 8 Mbps con frames de 64 bytes importa porque permite integrar decenas de sensores sin reescribir el bus, algo que con CAN clásico a 1 Mbps y 8 bytes obliga a multiplexar. El protocolo es agnóstico al PLC, así que se integra a equipos Siemens, Beckhoff y Rockwell ya desplegados en plantas locales. La barrera práctica es el costo: XELA todavía no publica precios oficiales y los sensores táctiles distribuidos suelen costar entre USD 800 y USD 2.500 por yema, lo que limita la adopción a líneas de alto valor unitario. ICRA 2026 en Viena (1-5 junio) es la oportunidad europea más cercana para que un equipo latinoamericano vea las demos sin viajar a EE.UU. o Japón.