
Uno de los disfrutes que entrega ser padre orgulloso o dueño de mascotas es que muchas cosas terminan tiradas por todas partes. Se puede levantar cada prenda descartada, juguete medio roto y resto del piso uno mismo, pero como padre de tres hijos, Nathaniel Nifong decidió usar su formación de ingeniero para potencialmente sobre-ingenierizar una garra robótica suspendida por cables que hace el trabajo por él.
Lo que llama Stringman robots necesita un punto de anclaje en cada una de las cuatro esquinas de la habitación. A partir de ahí, la grúa robótica puede barrer el techo, identificar objetivos para levantar y moverlos a puntos de drop-off predefinidos. Es un proyecto open source, con el firmware basado en LeRobot disponible en GitHub y las instrucciones de armado del hardware físico publicadas aparte. También hay una corrida piloto de hardware listo para usar y kits para quienes quieren probarlo sin armarlo desde cero, vía el sitio de su empresa.
¿Cómo funciona la grúa de cables?
La idea de fondo es que la grúa pueda correr durante una hora aproximadamente y resolver el desorden de su habitación sin que nadie tenga que hacer nada. El proceso aún no es perfecto: el transformer de difusión que implementa la visión por computador todavía necesita refinamiento, el gripper en sí mismo pelea con objetos como libros (preocupación legítima para padres y lectores empedernidos), y mientras la grúa opera los cables se hunden hacia abajo como riesgo potencial para quien esté en la pieza.
Comparada con una grúa puente tradicional, la suspensión por cables probablemente es más estable mecánicamente, pero ambas son un desafío de ingeniería interesante cuando se aplican al ámbito doméstico. El siguiente paso, según Nifong, sería que los objetos se puedan guardar donde corresponde en lugar de simplemente lanzarse al canasto, una tarea que por ahora sigue quedando a cargo de los adultos humanos.
Qué hay en el stack abierto: LeRobot, difusión y un firmware en GitHub
El firmware cranebot3-firmware se apoya en LeRobot, el framework open source de robots aprendices liberado por Hugging Face en 2024 y rápidamente adoptado por la comunidad maker. El modelo de visión que decide qué levantar y dónde dejarlo es un transformer de difusión: la misma familia de arquitecturas que está moviendo la robótica generalista en empresas como Physical Intelligence, Genesis AI y NVIDIA Isaac GR00T.
La elección de cables sobre rieles es deliberada. Una grúa puente requiere instalar dos rieles paralelos en el techo, una intervención estructural que en muchas viviendas no es viable. Los cuatro puntos de anclaje en las esquinas, en cambio, se pueden montar con armellas y pernos de fijación: invasivo, pero reversible. La cinemática suspendida por cables tiene su propia complejidad (control de cuatro motores que mantienen tensión sin oscilar), pero a cambio entrega un espacio de trabajo prácticamente tan grande como el área de la pieza.
¿Cuánto puede costar replicarlo en Chile?
Para hacer este proyecto en una pieza chilena estándar de 3×4 metros, la lista de materiales aproximada incluye:
- 4 motores paso a paso o BLDC con encoders: USD 80-120 (CLP 75.000-115.000)
- 4 puntos de anclaje en esquina (armellas + pernos): CLP 8.000-15.000
- Cable de acero o cordel kevlar (~30 m): CLP 12.000-20.000
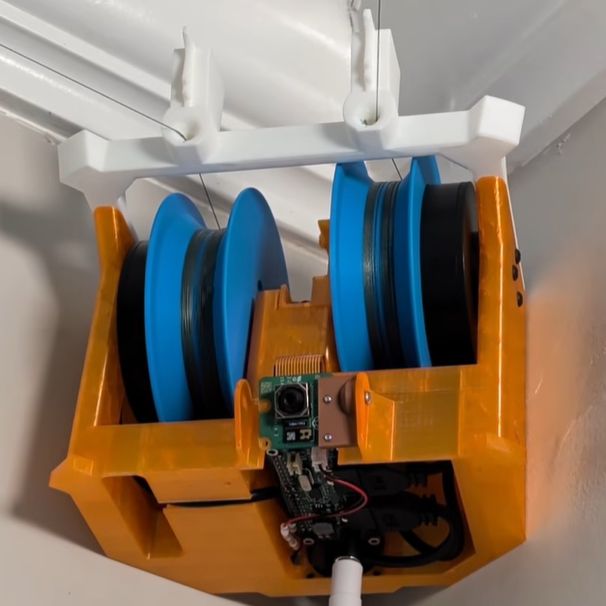
- Cámara para visión por computador (idealmente Raspberry Pi Camera Module 3 o webcam USB de buena calidad): CLP 35.000-60.000
- SBC para correr el firmware (Raspberry Pi 5 con 8 GB): CLP 110.000-130.000
- Garra mecánica impresa en 3D + servo: CLP 25.000-40.000
- Estructura de la garra impresa en 3D: filamento PLA o PETG, ~CLP 8.000
Total aproximado: CLP 280.000-390.000 sin contar la impresora 3D. Comparado con un robot Roomba para ordenar (que técnicamente no existe en esa categoría todavía a precio accesible), entra en rango maker razonable.
Implicancias para el ecosistema chileno de robótica casera
El proyecto entra en una tendencia clara: la barrera para hacer robótica seria en casa bajó dramáticamente con LeRobot y los modelos de difusión preentrenados. Hace dos años, replicar esto requería un equipo con experiencia previa en ROS, MoveIt y planificación de trayectorias. Hoy, un padre de tres hijos con tiempo de fin de semana y formación de ingeniero puede tener un prototipo funcional. Para clubes de robótica universitaria en Chile (PUC, USACH, UTFSM, UTEM) o para makers de Hacker Garage, Stringman es un buen punto de partida para experimentar con manipulación dexterosa sin meter un brazo robótico industrial.
La nota completa con video demo está disponible en Hackaday.



